

 science-review.ru
science-review.ru
Беспилотные летательные аппараты широко используются в гражданской и военной сферах. Для того чтобы интегрировать их в гражданское воздушное пространство, необходимо обеспечить надежность используемых компонентов.
Малогабаритные быстродействующие сервоприводы применяются в современных высокоточных системах управления подвижными объектами: рулевыми системами летательных аппаратов, автоматическими манипуляторами, роботами с подвижными элементами конструкции и др. [1]. Для правильного выполнения процедуры синтеза системы управления подобных элементов необходима информация о значениях параметров и структуре математического обоснования надежности работы сервопривода.
Надежность является ключевым фактором в процессе сертификации для оценки безопасности МБЛА. В настоящее время количество отказов МБЛА на один полет выше, чем у обычных пилотируемых самолетов. Феноменальное количество аварий беспилотных летательных аппаратов вызвано несовершенством систем управления полетом, двигательной установки и ошибками оператора [2]. Оценка общей надежности МБЛА имеет решающее значение, поскольку во многих продуктах КГС отсутствует необходимая информация о надежности. Основное внимание в этом исследовании уделяется оценке надежности компонентов, используемых в МБЛА. МБЛА обычно весят менее 2,4 кг, могут запускаться вручную при размахе крыльев менее 150 мм.
Постановка задачи
Надежность серводвигателей определяется как вероятность того, что изделие будет выполнять свою предназначенную функцию в течение определенного интервала времени при заданных условиях [3]. Надежность может быть определена количественно несколькими способами, включая определение вероятности отказа, частоты отказов и среднего времени наработки на отказ (То). Наработка на отказ определяется как среднее время, в течение которого система будет работать до тех пор, пока не произойдет сбой, или как величина, обратная частоте отказов.
То задается с помощью:
То = оперативное время / отклонение. (1)
На общую надежность системы влияет надежность ее подсистем. При испытании на отказ все компоненты тестируются до тех пор, пока они не выйдут из строя [4, 5]. Обратной связью о принятом положении рычага серводвигателя является широтно-модулированный импульсный сигнал. Бесщеточные двигатели постоянного тока, используемые в серводвигателях, обладают более высокой надежностью, чем их щеточные аналоги, поскольку щетки подвержены эрозии на коллекторе. Серводвигатели, тестируемые в рамках этого исследования, используют для управления полетом системы МБЛА.
Модель Вейбулла является одним из наиболее часто используемых распределений вероятности в области теории надежности. Распределение Вейбулла довольно универсально, охватывает путем варьирования параметров широкий диапазон случаев изменения вероятностей. Наряду с логарифмическим нормальным распределением оно удовлетворительно описывает наработку деталей по усталостным разрушениям, наработку до отказа подшипников, радиодеталей. Используется для оценки надежности деталей и узлов машин, в частности автомобилей, подъемно-транспортных и других машин. Применяется также для оценки надежности по приработочным отказам [6]. Основное преимущество анализа Вейбулла заключается в том, что он обеспечивает точную оценку отказов даже при относительно небольших выборках. Функция надежности задается формулой:
 . (2)
. (2)
Функция плотности распределения (Р(с)) и функция плотности вероятности (Р(р)) выражаются как:
 (3)
(3)
 , (4)
, (4)
где β – параметр формы Вейбулла, η – параметр шкалы Вейбулла, соответствующий времени, когда 63% выборки выходят из строя, а t – временные рамки. Распределения Вейбулла могут гибко представлять широкий спектр других распределений, включая экспоненциальное, нормальное, рэлеевское, пуассоновское и биномиальное. Однако одна кривая Вейбулла не способна отразить все три стадии, а именно увеличение, уменьшение и постоянство отказов [7]. При прогнозировании надежности электронного оборудования применяют два параметра Вейбулла для моделирования надежности оборудования, а прогнозируемая частота отказов (отказы/106 ч) выражается как:
 , (5)
, (5)
где α3B – срок службы подшипников двигателя по характеристике Вейбулла и αW – характеристика Вейбулла по сроку службы обмоток двигателя. Предполагая стандартную частоту отказов 2,3 × 10-5 на час полета, равную наработке на отказ 43 478 часов, мы получаем количество отказов/106 часов. Неисправность определяется как состояние, при котором серводвигатель больше не способен поднимать грузы с заданной частотой. Режим неисправности определяется с помощью визуального осмотра после того, как возникла неисправность. Неисправности подшипников приводят к существенной потере работоспособности серводвигателя.
Тестирование успешного запуска выполняется, когда ожидается, что все компоненты выдержат тестирование с нулевыми сбоями. Тестирование успешного запуска используется для проверки определенного критерия надежности, когда ожидается, что в течение ограниченного по времени тестирования не произойдет никаких сбоев. Определяется количество выборок, необходимых для успешного выполнения теста, и на основе биномиального распределения, где p представляет вероятность неудачи, вероятность получения k плохих элементов и (n – k) хороших элементов определяется по формуле [7]:
 . (6)
. (6)
Были приняты разумные значения надежности 80% при доверительном уровне C 50%, что привело к размеру выборки в семь человек с фактическим уровнем достоверности 52% и уровнем достоверности, выраженным как:
R = 1 – p (7)
 . (8)
. (8)
Все компоненты запускались непрерывно до отказа, и время до отказа регистрировалось. Моделирование в MATLABTM допускало изменение входных данных для серводвигателя, а именно частоты цикла и частоты обновления. Количество запусков зависит от требований к питанию. В условиях, когда для компонента требовалось несколько запусков, порядок выбирается случайным образом, чтобы уменьшить влияние любых неизвестных переменных. Также регистрировалась температура окружающей среды, поскольку она влияет на срок службы изоляции и увеличение сопротивления проводников. Была выбрана самая высокая частота обновления, чтобы обеспечить серводвигатели с более плавным непрерывным движением во время цикла. При работе серводвигателей на максимальном напряжении серводвигатели работали под более высоким напряжением. Это сократило время, необходимое для проведения эксперимента, поскольку время до отказа зависит от стресса. Частота цикла серводвигателей выбрана как минимально возможная, чтобы серводвигатели могли достигать всего диапазона значений угла даже при нагрузке. Условия нагрузки были выбраны таким образом, чтобы представлять усилия, которые можно было ожидать от МБЛА. Испытательный крутящий момент τ задается формулой:
 , (9)
, (9)
где S=30º – угол наклона поверхности управления от нейтрали, n=45º – угол отклонения рычага серводвигателя от нейтрали, M=28,6 г/моль – молекулярная масса воздуха, p – давление воздуха, C=60 мм – хорда, L=440 мм – длина поверхности управления, V=40 м/с – скорость полета, T – температура в градусах Цельсия и является постоянной идеального газа и равна 8,31451 ДжК-1моль-1. С учетом характеристик МБЛА, такого как JAVELIN [7], крутящий момент (τ) гр.см получается при максимальной скорости 40 м/с. Полученные значения крутящего момента элеронов и отклонения поверхности сравниваются. Принятые допущения и ограничения: условия окружающей среды, включая уровень моря, нулевую влажность и температуру 12°C, нулевые ускорения и угловые скорости, угол атаки крыла, стабилизатора, предохранителя и поверхностей управления – равны нулю, рычаги управления имеют нулевое смещение по линии шарнира, механизмы управления без трения, поверхности сбалансированы по массе, аэродинамические противовесы нулевые.
Экспериментальная часть
Для испытания использовались семь цифровых серводвигателей HK15148B [8]. Дополнительно применялись GW Instek SPS3610, Manson NP-9615, 5 м финишной проволоки весом 5,2 кг, семь грузиков по 500 г каждый, микроконтроллер, портативный компьютер, веб-камера, три соединительных провода макетной платы и три зажима типа «крокодил». Для наблюдения за тестированием использовалась веб-камера с разрешением 640x480 пикселей, которой управлял скрипт на python. Частота трех кадров в секунду (FPS) выбирается на основе параметров периода работы серводвигателя (1 сек) и размера используемого видеофайла.
Зафиксированы периоды отказов и соответствующее время до отказа. Результирующий логарифмический график соответствия модели Вейбулла показан на рисунке 1 [7].
Точное время выхода из строя 2-го, 5-го и 11-го серводвигателей зафиксировано между 3,5 и 4,5 часами из-за чрезмерного изменения условий освещения, которые повлияли на точный сбор данных, и представлено в параметр формы Вейбулла β=0,7986, параметр шкалы Вейбулла η=25,71 получены в пределах 95%-ного доверительного интервала. По результатам испытаний под нагрузкой [9] получена наработка на отказ серводвигателя, которая составила 29 часов и 12 минут.
Анализ вышедших из строя серводвигателей позволяет получить представление о причинах отказов. Значение параметра шкалы функции Вейбулла ниже единицы указывает на то, что частота отказов уменьшается с течением времени и что в серводвигателях наблюдается значительная частота отказов: пять из семи выходят из строя менее чем за 24 часа.
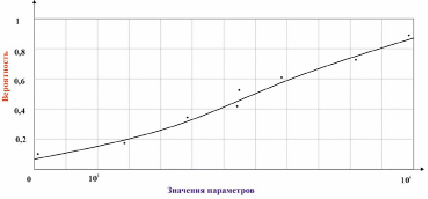
Рис. 1. Результаты испытаний серводвигателей по модели Вейбулла
Результирующая наработка на отказ серводвигателей не соответствует требованиям, предъявляемым к пилотируемым самолетам, и значительно ниже оценки в 43 478 часов.
Надежность является одним из ряда факторов, влияющих на риск, который беспилотные летательные аппараты представляют для людей и имущества на земле. Если предположить, что отказ сервопривода является «катастрофическим» (т.е. приводит к потере управления воздушным судном), то результаты по надежности указывают на уровень надежности, ожидаемый для недорогих сервоприводов. Такие сервоприводы могли бы использоваться для операций беспилотных летательных аппаратов с низким уровнем риска (например, небольших беспилотных летательных аппаратов, работающих в малонаселенных регионах) и там, где экономика бизнес-модели допускает более высокие показатели потерь платформы.
На рисунках 2a и 2б показаны результаты функции плотности распределения (Р(p)) и функции плотности вероятности (Р(с)) для протестированных серводвигателей соответственно.
Для данных испытаний разрабатываются методология и испытательный стенд. Хотя параметры недорогих серводвигателей не отвечают применимым стандартам сертификации, делается вывод, что параметры надежности могут быть достаточными для выполнения требования к операциям беспилотных летательных аппаратов с низким уровнем риска (например, полеты небольших беспилотных летательных аппаратов над малонаселенными районами).
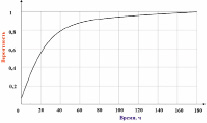
а)
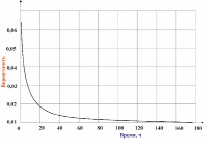
б)
а) функция плотности распределения Р(с) б) функция плотности вероятности Р(p)
Рис. 2. Результаты испытаний серводвигателей
Будущие исследования будут посвящены внедрению компонентов в различные авиационные системы и системы управления полетом, включая распознавание и уклонение, выработку (распределение) и хранение электроэнергии, лазерное предотвращение препятствий и мониторинг, интегрированную навигацию и наведение [10], и системы повышения целостности.
Заключение
Таким образом, были представлены экспериментальные мероприятия, проведенные для оценки надежности недорогих серводвигателей КГС. Полученные результаты указывают на уровень надежности, ожидаемый для недорогих сервоприводов. Такие сервоприводы можно было бы использовать для операций с МБЛА с низким уровнем риска (например, для работающих в малонаселенных регионах) и там, где экономика бизнес-модели допускает более высокие показатели потерь. Для серводвигателей было зафиксировано время до отказа, подверженное серьезными нагрузками во всем диапазоне операций. Для получения профиля частоты отказов была принята модель Вейбулла. Расчетная наработка на отказ для подобных серводвигателей составила 29 часов и 12 минут.
Библиографическая ссылка
Дьяков Д.Е., Лиховидов Д.В., Великанов А.В. ОБОСНОВАНИЕ НАДЕЖНОСТИ РАБОТЫ СЕРВОДВИГАТЕЛЕЙ ДЛЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ // Научное обозрение. Технические науки. – 2023. – № 3. – С. 5-9;URL: https://science-engineering.ru/ru/article/view?id=1435 (дата обращения: 16.05.2024).