

 science-review.ru
science-review.ru
Scientific journal
Scientific Review. Technical science
ISSN 2500-0799
ПИ №ФС77-57440
QUESTIONS OF DESIGNING THE HARDWARE PART OF THE INFORMATION MEASUREMENT SYSTEM OF ELECTROIMPEDANCE TOMOGRAPHY

Известны конструкции устройств электроимпедансной томографии (ЭИТ) [1, 2], которые представляют собой модули измерения в составе аппаратно-программного комплекса ЭИТ (АПК ЭИТ) проведения исследований методом электроимпедансной томографии (ЭИТ). Данный тип устройств позволяет осуществлять измерение величин электрических потенциалов на поверхности исследуемого объекта и передачу для дальнейшей обработки их на персональный компьютер. Указанные устройства позволяют выполнять исследования методом ЭИТ с задействованием только одного электродного пояса, таким образом, являясь примером технической реализации метода традиционной двумерной ЭИТ.
В данной работе рассматриваются принципы построения устройств, позволяющих проводить измерения с задействованием нескольких поясов пациента. Таким образом, указанные устройства являются техническими средствами реализации метода трехмерной или многоракурсной электроимпедансной томографии (МРЭИТ) [3].
Преимущества метода МРЭИТ описаны в ряде публикаций [3–6]. Вместе с тем сложность и ресурсоемкость проектирования аппаратной части такого аппаратно-программного комплекса возрастает пропорционально количеству поддерживаемых электродных поясов.
Материалы и методы исследования
Описанные принципы построения аппаратно-программных комплексов двумерной электроимпедансной томографии [1, 2] не рассчитаны на проведение исследований методом МРЭИТ.
Таким образом, на основе анализа существующих решений разработаны дополнительные требования к техническим средствам, реализующим метод МРЭИТ:
– поддержка проведения измерений с помощью заданного числа электродных поясов;
– автоматизация процесса измерения;
– масштабируемость, модульность конструкции (возможность изменять количество поддерживаемых поясов пациентов).
При этом сохраняются требования, являющиеся общими для методов как традиционной двухмерной ЭИТ, так и МРЭИТ: это скорость и точность получения результата процесса измерения, а также безопасность обслуживающего персонала и объекта исследования.
Для соответствия озвученным требованиям, в особенности в части автоматизации процесса измерения, не имеет альтернативы применение микроконтроллера (МК) на основе однокристальной ЭВМ [7] с необходимым количеством портов ввода-вывода и скоростью обработки данных, достаточной для управления процессом измерений и обработки полученных измерительных данных.
Кроме того, дополнительным инструментом автоматизации измерительного процесса являются периферийные устройства, управляемые микроконтроллером через цифровые линии: источник инжектирующего тока, коммутаторы, схемы усиления измерительных каналов.
Результаты исследования и их обсуждение
На основе сформированных требований к аппаратной части АПК МРЭИТ разработана структурная схема измерительного устройства (БИ), подключенного к персональному компьютеру (ПК). Структурная схема представлена на рис. 1.

Рис. 1. Структурная схема измерительного устройства
Измерительное устройство МРЭИТ состоит из следующих блоков:
– микропроцессор (МК),
– источник инжектирующего тока (ИТ),
– программируемый усилитель измерительного канала (ПУ),
– блок коммутации, состоящий из коммутатора электродных поясов (КЭП) и n блоков мультиплексоров электродных поясов, где n – число электродных поясов,
– блок питания (БП),
– блок электродов (БЭ), с помощью которого объект исследования ИО подключается к БИ.
Как видно из разработанной структурной схемы, микроконтроллер является главным компонентом БИ, с помощью которого осуществляется управление процессом измерения, в частности задание режимов работы блоков коммутации электродных поясов, ИТ и ПУ. Кроме того, при помощи МК осуществляется прием заданных пользователем ПК параметров исследования, и отправка полученных измерительных данных на ПК для последующей обработки и интерпретации.
Источник тока ИТ состоит из амплитудо-задающего цифро-аналогового преобразователя (АЦАП), цифрового синтезатора сигналов (ЦСС) и преобразователя напряжение-ток (ПНТ).
Функциональная схема ИТ показана на рис. 2.
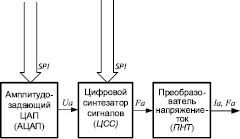
Рис. 2. Функциональная схема ИТ
Амплитудо-задающий цифро-аналоговый преобразователь (АЦАП) служит для задания амплитуды выходного тока Ia ИТ, ЦСС, в свою очередь, выполняет функциональность генератора напряжения переменного тока. Цифровой синтезатор сигнало ЦСС является источником управляющего напряжения для ПНТ, с его помощью производится задание формы, частоты Fa выходного инжектирующего тока [8].
Как АЦАП, так и ЦСС управляются МК по цифровой последовательной шине SPI [9] или аналогичной ей. Применение последовательной шины позволяет уменьшить количество задействованных в управлении периферийными устройствами цифровых выходов МК. Так, в описанной конструкции ИТ АЦАП И ЦСС используют одни и те же цифровые выходы МК.
Выходом ИТ служит ПНТ, который представляет собой схему источника тока, управляемого напряжением [10].
Требования к источнику тока, результаты исследований режимов его работы представлены в [3].
Блок коммутации представляет собой схему, состоящую из аналоговых мультиплексоров [11], функциональная схема блока представлена на рис. 3.
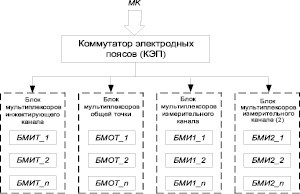
Рис. 3. Функциональная схема блока коммутации

Рис. 4. Функциональная схема блока ПУ
Коммутатор электродных поясов управляется цифровыми последовательностями, источником которых служит МК, и разрешает одновременную работу мультиплексоров инжектирующего канала (БМИТ_i), канала общей точки (БМОТ_i), и измерительных каналов БМИ1_i, БМИ2_i, где i – номер электродного пояса, i = 1..n. Таким образом, с помощью КЭП осуществляется выбор электродного пояса, на котором будет происходить измерение. Мультиплексоры БМИТ_i, БМОТ_i, БМИ1_i, БМИ2_i, также управляемые МК по цифровым линиям, обеспечивают переключение между электродами в пределах выбранного электродного пояса. Управление переключением электродных поясов с помощью КЭП происходит таким образом, что при активации заданного пояса с помощью единственной линии разрешения работы становятся активными все коммутаторы БМИТ_i, БМОТ_i, БМИ1_i, БМИ2_i. Достоинством такого решения является экономия задействованных цифровых выходов управления МК, что существенно при проектировании сложных устройств с развитой периферией. Недостаток применяемого решения состоит в невозможности выбора коммутаторов БМИТ, БМОТ, БМИ1, БМИ2 из разных поясов.
Функциональная схема блока ПУ показана на рис. 4.
Программируемый усилитель измерительного канала (ПУ), также управляемый микропроцессором по цифровым линиям, позволяет динамически изменять коэффициент усиления входящего измерительного сигнала в зависимости от его амплитуды.
Выход ПУ соединен со входом АЦП [12], выполняющим функцию регистрации измерительного сигнала. Измерительные данные в цифровом виде обрабатываются МК и направляются по линии USB в ПК для дальнейшей обработки.
Управление ПУ осуществляется следующим образом: с помощью цифровых выходов управления коэффициентом усиления ПУ Ку МК устанавливает минимальное значение Ку, выполняется измерение амплитуды измерительного сигнала с помощью АЦП, на основании обработки результатов измерения МК при необходимости осуществляется повторный выбор Ку, и процедура измерения амплитуды измерительного сигнала повторяется заново.
Многоканальный блок питания (БП) обеспечивает подачу требуемых другими компонентами устройства величин напряжения питания, а также обеспечивает функции гальванической развязки ИО с ПК и электрической сетью. Таким образом, применение выбранного БП позволяет удовлетворить выдвинутые требования к блоку измерения в части электробезопасности. Требования к БП, принципы построения и реализация представлены в [13–14].
Выбор решений МК, ИТ, ПУ и КЭП позволяет реализовать автоматизированное процессом исследования ИО методом МРЭИТ, применение разработанных технических решений способно расширить функциональные возможности АПК МРЭИТ.
Выводы
В работе рассмотрены принципы технической реализации аппаратной части информационно-измерительной системы многоракурсной электроимпедансной томографии. Проведен анализ принципов построения устройств, позволяющих проводить измерения с задействованием нескольких поясов пациента. В результате проведенного анализа существующих решений сформированы функциональные требования к аппаратной части в целом и к основным компонентам информационно-измерительной системы в частности. На основе предъявляемых требований разработана структурная схема блока измерения, а также функциональных схем основных компонентов в его составе: источника инжектирующего тока, блока коммутации электродных поясов и блока программируемого усилителя измерительного канала. Описаны как алгоритмы функционирования аппаратной части аппаратно-программного комплекса, так и алгоритмы функционирования отдельных его блоков, обозначены роли периферийных устройств, управляемых микроконтроллером через цифровые линии, в автоматизации процесса измерения. В частности, дано описание алгоритма переключения инжектирующих и измерительных каналов, задействованных в процессе проведения исследования. Разработанные в статье технические решения позволяют в кратчайшие сроки реализовать автоматическое управление процессом измерения для информационно-измерительной системы многоракурсной электроимпедансной томографии.
Работы выполняются в рамках гранта Президента Российской Федерации для государственной поддержки молодых российских ученых МК-196.2017.8.
Библиографическая ссылка
Алексанян Г.К., Кучер А.И., Щербаков И.Д., Ланкина Ю.К. ВОПРОСЫ ПРОЕКТИРОВАНИЯ АППАРАТНОЙ ЧАСТИ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ ЭЛЕКТРОИМПЕДАНСНОЙ ТОМОГРАФИИ // Научное обозрение. Технические науки. 2019. № 1. С. 5-9;URL: https://science-engineering.ru/en/article/view?id=1223 (дата обращения: 26.07.2026).