

 science-review.ru
science-review.ru
Scientific journal
Scientific Review. Technical science
ISSN 2500-0799
ПИ №ФС77-57440
RESEARCH AND DEVELOPMENT OF EXPERIMENTAL SAMPLE OF ACOUSTIC SPEED METER AND DIRECTION OF FLOW

Среди методов измерений скорости потока отметим гидродинамические преобразователи скорости течения, в качестве которых широкое распространение получили роторы Савониуса, винты Архимеда, импеллеры и т.д. Их распространенность обусловлена простой и технологичной конструкцией, линейной зависимостью между скоростью потока и угловой частотой вращения в рабочем диапазоне скоростей. К недостаткам этих преобразователей скорости течения можно отнести высокую нелинейность при малых скоростях потока, наличие вращающихся частей и достаточно большую инерционность. С другой стороны, отметим, что измерение скорости течения проводящей жидкости возможно на основе использования метода электромагнитной индукции, при котором возможно появление ЭДС во время движения электропроводящей жидкости в магнитном поле. При этом возникающая ЭДС соответствует величине векторного произведения напряженности магнитного поля и скорости движения жидкости. При проектировании магнитогидродинамических преобразователей необходимо уделять большое внимание конструкции самого преобразователя и особенно материалам электродов. К основным недостаткам можно отнести открытые электроды в электролите (морской воде), что может привести к изменению показаний со временем.
Акустические методы
Из акустических методов измерения скорости потока можно выделить два типа: основанные на эффекте Доплера и измерении времени распространения звука на известной базе. Метод, основанный на эффекте Доплера, заключается в том, что если излучить в наклонном направлении к движущемуся слою воды, содержащему взвешенные частицы, акустические колебания и затем принять рассеянные водным слоем сигналы, то частота принятых колебаний будет отличаться от частоты излученных колебаний на величину, зависящую от скорости потока. Преимущество этого способа состоит в том, что с помощью одного прибора можно измерять скорость потока по толщине некоторого столба воды. К недостаткам можно отнести сложность приемо-передающей части, обязательное наличие взвешенных частиц, а также этот способ измерения потока может иметь большую погрешность, связанную с изменением скорости звука. Метод измерения скорости потока по времени распространения звука вдоль известной базы основан на использовании зависимости времени распространения ультразвука между излучателем и приемником, от скорости движения водных масс на его пути. Методы и технические средства гидрофизических измерений их использующие рассмотрены в литературных источниках [1–3]. Ниже рассмотрим некоторые методы измерения скорости звука в водной толще детально.
Метод по времени распространения. Рассмотрим следующую схему (рис. 1).
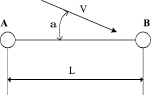
Рис. 1. Схема, поясняющая метод измерения скорости потока по времени распространения. А и В – обратимые приемо-излучатели; L – расстояние между ними (в дальнейшем база); V – скорость потока; a – угол между направлением скорости течения и базой; С – скорость звука
Для упрощения последующих математических выражений под VL будет подразумеваться проекция скорости течения на базу, т.е. V*cos(α). Время распространения звука от излучателя к приемнику в этом случае описывается следующим выражением:
 – при распространении от А к В,
– при распространении от А к В,
 – при распространении от В к А.
– при распространении от В к А.
Если считать, что скорость потока за время этих измерений не менялась, то простыми преобразованиями получаем
 (1)
(1)
 (2)
(2)
Для измерения времени распространения звука вдоль базы можно рассмотреть несколько приемов: частотно-импульсный, время-импульсный и фазовый.
Частотно-импульсный метод. Рассмотрим схему на рис. 2.
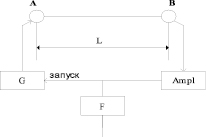
Рис. 2. Схема, поясняющая частотно-импульсный метод измерения скорости потока. А – излучатель, В – приемник; L – расстояние между излучателем и приемником (в дальнейшем база); G – генератор коротких одиночных импульсов с внешним запуском; Ampl – усилитель; F – частотомер
В этом замкнутом электронно-акустическом тракте частота повторения импульсов определяется временем распространения звука от А к В. Основным преимуществом этого метода является большой динамический диапазон измерения скорости потока. При небольшом усложнении схемы можно измерять скорость распространения в обоих направлениях и таким образом производить вычисления по формулам (1) и (2). При этом способе надо учитывать фазовые и частотные характеристики приемо-передатчиков и электронного тракта во всем используемом диапазоне частот, что сказывается на линейности преобразователя. Дополнительные сложности может вызвать паразитная амплитудная модуляция.
Время-импульсный метод. Рассмотрим схему на рис. 3.
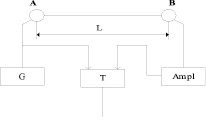
Рис. 3. Схема, поясняющая время-импульсный метод измерения скорости потока. А – излучатель, В – приемник; L – расстояние между излучателем и приемником (в дальнейшем база); G – генератор коротких импульсов; Ampl – усилитель; T – измеритель периода
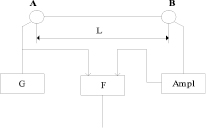
Рис. 4. Блок-схема, поясняющая фазовый метод измерения скорости потока. А – излучатель; В – приемник; L – расстояние между излучателем и приемником (в дальнейшем база); G – генератор сигнала; Ampl – усилитель; F – фазовый детектор
В этом случае непосредственно измеряется задержка распространения от приемника к излучателю. По своим особенностям практически не отличается от частотно-импульсного метода, только измерения происходят при одинаковой частоте импульсов. Основным недостатком является погрешность измерения от крутизны фронтов импульсов, снимаемых с приёмника.
Фазовый метод. Рассмотрим схему на рис. 4.
Ниже представлена блок-схема фазового измерителя потока (рис. 5).
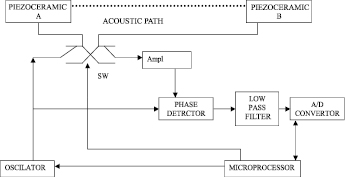
Рис. 5. Блок-схема фазового измерителя скорости потока
Под управлением микропроцессора переключателем SW осуществляется выбор направления излучения-приёма. Для исключения неоднозначности фазы, связанной с большим диапазоном возможного изменения скорости звука, измерения могут производиться на нескольких частотах в диапазоне от 100 кГц до 2 МГц, в состав измерительного блока должен быть введён измеритель скорости звука. Скорость звука может быть также получена косвенными методами по результатам измерения солёности (электропроводности), давления и температуры. В приемнике происходит предварительное усиление сигнала с пьезокерамического датчика и формирование импульсов необходимых для работы фазового детектора.
В этом случае фазу принятого сигнала можно выразить так (по одному направлению):
φab = φta + φttab + φrb + φrec,
где φta – фаза между напряжением, приложенным к излучателю, и акустическим давлением;
φrb – фаза между акустическим давлением и напряжением на выходе пьезоприёмника;
φrec – фазовый сдвиг в предварительном усилителе;
φttab – набег фазы за время распространения по воде;
φab – разность фаз на входе фазового детектора.
Фазовые сдвиги в приёмнике, излучателе и предварительном усилителе не зависят от параметров среды, и их можно учесть на этапе калибровки. Разность фаз на входе фазового детектора определяется временем распространения сигнала вдоль базы, в случае если время распространения известно с точностью периода частоты, на которой ведутся измерения, то φab однозначно определяет время распространения сигнала.
Для исключения дополнительных погрешностей, связанных с нелинейностью фазового детектора на краях диапазона измерения и постоянным смещением, в канале прямого сигнала может применяться устройство сдвига фазы на угол 0–90–180–270 градусов, контролируемое микропроцессором [1–3].
Дополнительные датчики
Для однозначного определения направления течения в состав измерительного блока должен входить компас и акселерометр. В настоящее время наиболее подходящим для данной задачи является модуль (например, HMR3300 фирмы HONEYWELL), который позволяет измерять направление с точностью не хуже 1 градуса. В состав данного модуля также входит акселерометр с диапазоном +/-60 градусов и точностью 1 градус. Также возможно применение набора (микросхем HMC1055 той же фирмы), что позволит сократить размеры модуля и энергопотребление. Для повышения точности измерения потока в состав прибора целесообразно ввести датчик температуры для компенсации температурных погрешностей, связанных с изменениями базы от температуры.
Основные погрешности измерений
Основные погрешности измерения скорости потока и скорости звука связаны с ошибками в измерении времени распространения и изменениями базы от температуры. Необходимый диапазон измерения времени распространения определяется в основном изменением скорости звука в воде, который составляет в среднем от 1400 до 1600 м/c или приблизительно 1500 м/c +/- 7 %. Скорость самого потока составляет менее 1 % от скорости звука. Если положить базу равной 100 мм, необходимый диапазон измерения времени распространения составит приблизительно от 60 ns до 70 ns или 65 +/- 5 ns. Для достижения точности измерения потока около 10 мм/с необходимо измерять время с погрешностью не более 0,5 ns. В случае время-импульсного или частотного методов достижение такой точности затруднительно, а при фазовом методе разрешение по времени в течение одного периода несущей частоты определяется погрешностью фазового детектора на частоте, при которой происходит измерение. Если считать разрешение фазового детектора менее 0,1 градуса, то на частоте 2 МГц это будет соответствовать разрешению лучше 0,5 ns. При частотном диапазоне от 100 кГц до 2 МГц вопрос о неоднозначности фазы практически снимается, если производить измерения на нескольких частотах. Так наибольшая возможная разность времени распространения сигнала при базе 0,1 м составит около 10 us, что соответствует частоте 100 кГц. Изменение базы от температуры зависит от типа применяемых материалов и конструкции для крепления пьезоэлементов. Для оценки можно рассмотреть случай, когда база составляет приблизительно 100 мм и материал имеет температурный коэффициент расширения λ = 11*10–6(1/ °C) (сталь нержавеющая). При изменении температуры на 50 °C изменение длины составит 0,055 мм или около 0,06 %, что приведёт к погрешности измерения потока около 7 %. В случае применения стеклопластика с температурным коэффициентом расширения около λ = 20*10–6(1/ °C) погрешность измерения потока будет близка к 15 %. Для повышения точности можно использовать введение поправок на температуру [4, 5].
Обоснование выбора методов
Из всех приведенных выше акустических методов измерения потока в настоящее время широко используются доплеровский и фазовый. Измерители потока, основанные на эффекте Доплера, выпускаются многими фирмами, но в состав этих измерителей входит сложная приёмо-передающая акустическая система. Для повышения чувствительности к мелким взвешенным частицам используют частоты порядка 1 МГц, что приводит к значительным мощностям на излучение для работы в достаточно большом диапазоне расстояний. Фазовые измерители скорости потока имеют значительно более простые приёмо-передающие узлы и так же широко выпускаются, но мощность излучения значительно ниже по сравнению с доплеровскими измерителями. При выборе метода измерения потока в основном внимание уделялось простоте конструкции датчика и низкому энергопотреблению, что важно в случае использования датчика скорости потока в составе автономной станции. Эти датчики могут применяться при любом способе, основанном на измерении времени распространения. Достаточно простая конструкция электронной части получается при фазовом методе, так как в этом случае нет необходимости компенсировать паразитную амплитудную модуляцию, а фазо-частотные характеристики приёмо-передающего тракта могут быть калиброваны на фиксированных частотах.
Исследования характеристик пьезодатчиков
Основным элементом ультразвуковой системы измерительного модуля скорости и направления течения являются пъезоэлектрические (пьезокерамические) датчики. Датчики изготовляются на основе пьезоэлементов в виде тонких пластин пьезокерамики с продольной поляризацией. В ходе первоочередных работ по созданию ультразвукового измерителя скорости потока были проведены испытания макетов датчиков на предмет исследования их чувствительности. При проведении лабораторных испытаний главной задачей была отработка технологий герметизации пьезодатчиков, как и выбор образцов пьезодатчиков. Был выполнен подбор высокочастотных пьезодатчиков с резонансными частотами от 350 кГц до 800 кГц. Все протестированные датчики позволяли работать в требуемом частотном диапазоне более одной декады. Для герметизации пьезоэлементов применялись силиконовые герметики. Лучшие результаты показали датчики, где пьезокерамика жёстко прикреплялась на подложку по всей плоскости. Амплитуда напряжения на излучателе была постоянной и составляла 7 V. Для проведения измерений был разработан предусилитель на дискретных элементах, так как на таких частотах интегральные усилители имели большой потребляемый ток: около 10 mA, тогда как разработанный усилитель потреблял 2,7 Ma [6, 7].
Заключение
Из акустических методов измерения скорости потока можно выделить два типа: основанные на эффекте Доплера и измерении времени распространения звука на известной базе. Метод измерения скорости потока по времени распространения звука вдоль известной базы основан на использовании зависимости времени распространения ультразвука между излучателем и приемником, от скорости движения водных масс на его пути. Для однозначного определения направления течения в состав измерительного блока должны входить компас и акселерометр. Необходимый диапазон измерения времени распространения определяется в основном изменением скорости звука в воде, который составляет в среднем от 1400 до 1600 м/c или приблизительно 1500 м/c +/- 7 %. Отметим, из приведенных выше акустических методов измерения потока в настоящее время широко используются доплеровский и фазовый. Важнейшим элементом ультразвуковой системы измерительного модуля скорости и направления течения являются пъезоэлектрические (пьезокерамические) датчики. Датчики изготовляются на основе пьезоэлементов в виде тонких пластин пьезокерамики с продольной поляризацией. В ходе первоочередных работ по созданию ультразвукового измерителя скорости потока были проведены испытания макетов датчиков на предмет исследования их чувствительности. Основные погрешности измерения скорости потока и скорости звука связаны с ошибками в измерении времени распространения и изменениями базы от температуры.
Работа выполнена в рамках государственного задания ИО РАН на 2020 год (тема № 0149-2020-0011) при поддержке РФФИ (проект № 20-05-00384_A и проект № 18-05-60070 «Арктика»).
Библиографическая ссылка
Лискин В.А., Тихонова Н.Ф. ИССЛЕДОВАНИЕ И РАЗРАБОТКА ЭКСПЕРИМЕНТАЛЬНОГО ОБРАЗЦА АКУСТИЧЕСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ И НАПРАВЛЕНИЯ ТЕЧЕНИЙ // Научное обозрение. Технические науки. 2020. № 5. С. 65-69;URL: https://science-engineering.ru/en/article/view?id=1318 (дата обращения: 24.06.2026).
DOI: https://doi.org/10.17513/srts.1318