

 science-review.ru
science-review.ru
Scientific journal
Scientific Review. Technical science
ISSN 2500-0799
ПИ №ФС77-57440
IMPROVING THE OPERATION OF HYDRAULIC CYLINDERS OF UNITS

В настоящее время основной объем подземной добычи угля обеспечивается агрегатами с механизированными крепями. Они обеспечивают управление боковыми породами очистного забоя. Выполняют передвижение забойного конвейера.
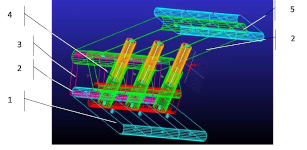
Крепь состоит из секций (рис. 1) с насосной станцией, распределительной и измерительной аппаратурой. Исполнительными органами крепи являются гидростойки, гидродомкраты передвижения крепи и конвейера, вспомогательные гидроцилиндры для управления конвейером и боковой устойчивостью секций. Еще большие возможности возникают при встраивании датчиков в системы гидропривода. Информативность таких систем резко возрастает, причем схемы установки просты, а работа надежна. Будучи гибким звеном управления, они гармонично входят в систему и расширяют класс решаемых задач [1; 2].
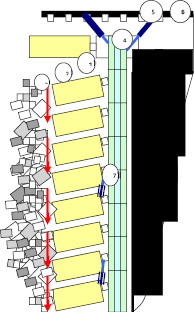
а)
б)
Рис. 1. Группа секций крепи ОКП 70 (а) и ее положение при выемке по простиранию пласта (б); α – угол падения пласта; 1 – забойная и 2 – завальная части основания, 3 – рычаги лемнискатного механизма, 4 – гидростойка
Цель работы: исследование и проработка конструктивных схем таких систем, их обоснование и улучшение в программном пакете Adams.
Материалы и методы исследования основаны на анализе конструктивных схем, нахождении новых решений, обосновании и применении пакетов моделирования системы CAD/CAM на основе методов объектно ориентированного программирования с линеаризацией уравнений динамики.
Результаты исследования и их обсуждение
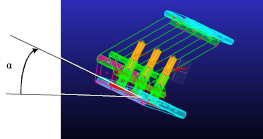
Создание очистных крепей с маневрирующими функциями [3] позволит повысить эффективность работы лав и безопасность персонала, облегчив труд людей. Секции крепи установлены по всей длине лавы (100–300 м), они активно поддерживают породы кровли и управляют их состоянием. По мере снятия стружки угля секции передвигаются к забою за счет конвейер-балки, вначале отталкивая её, а затем подтягиваясь к ней в момент, когда другие секции удерживают её. Существуют и схемы, когда передвижка осуществляется отталкиванием одной секции от другой, а затем подтягиванием отстающей к опережающей. Причем домкраты передвижения в этом случае установлены по бокам секции, так что один конец домкрата связан с одной секцией, а другой – с другой. Секции не связаны с конвейером, и возможна технология работ с выемкой минерала комбайном и поворотным конвейером на собственном ходу. При выемке по простиранию на крутых и наклонных пластах завальные концы секций крепи под собственным весом сползают по падению пласта (рис. 1). Показано моделирование группы секций крепи типа ОКП 70 в пакете Adams [4]. Чтобы предотвратить сползание секций, их передвигают с активным подпором, за счет подтягивания к конвейеру с опорой на соседние секции. На рис. 2 рассмотрен пример предотвращения сползания завальных частей основания за счет привязки конвейер-балки крепи на вентиляционном штреке [5; 6]. Забойные части 1 не могут сползать, поскольку прикреплены домкратами передвижения к конвейеру. Как показывает модель (рис. 2), сползание основания в рассмотренной схеме возможно за счет зазоров крепления домкратов в проушинах и не может быть большим, частично компенсируется ходом гидроцилиндра на величину Δ. При этом гидрораспределитель крепи должен быть модернизирован. В данном случае Δ = (Lл – Lп) – дополнительно контролируется сигналами гирконовых датчиков, связанных со штоками левого и правого домкрата передвижения. Значения Δ = 0 можно добиться подачей давления в штоковые полости. Скорости перемещения и развиваемого усилия поршня различны при прямом и обратном ходе поршня за счёт разницы площадей со стороны поршня и штока, что влияет на режим передвижения.
а) б)
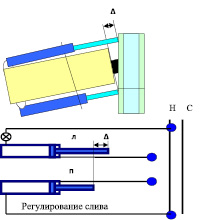
в) г)
Рис. 2. Проблемы разработки при выемке по простиранию: а) моделирование сползания; б) графики скоростей сползания по осям (для схемы слева сползание отсутствует); в) 1 – секция крепи, 2 – сползание завальных частей под действием их веса и обрушенных пород (3), 4 – конвейер, 5 – домкрат удержания конвейера, 6 – штрековая крепь, 7 – домкрат для равномерного распределения веса конвейера, Δ – разница между выдвижением левого и правого домкрата; г) управление разницей хода Δ за счет регулирования слива в левом домкрате и ускорения движения правого (нижнего)
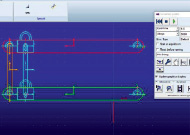
В гидроцилиндрах применяют два режима работы: сопротивление вдавливанию поршня через шток – в гидростойке, и выдвижения штока – в домкратах передвижения и бокового распора. При износе проушин крепления гидроцилиндров и возникновении эксцентриситета возможен изгиб штока [4]. Расчет гидроцилиндров с учетом эксцентриситета можно выполнить на основе [2; 4], а также с применением системы APM FEM, интегрированной в «КОМПАС-3D» включающей конечно-элементный анализ трехмерной твердотельной модели. Позволяет с учетом распределения температур провести следующие расчеты: статический, устойчивости, собственных частот и форм колебаний. Для подключения системы APM FEM при установке «КОМПАС-3D» [7] следует поставить галочку напротив опции. После активации библиотеки станет доступна инструментальная панель APM FEM. Для выполнения прочностного анализа расчета служит команда «Расчет в панели инструментов – Разбиение и расчет». После вызова команды на экране появляется диалоговое окно, запрашивающее вид производимого расчета. Выбран статистический расчет и расчет на устойчивость (рис. 3).
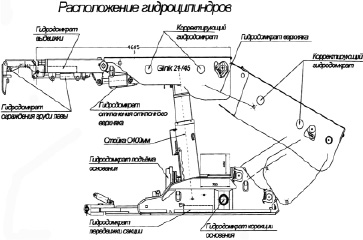
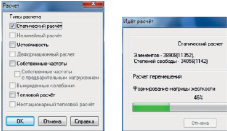
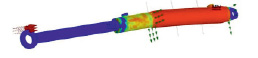
Рис. 3. Схема расположения гидроцилиндров крепи типа «Глиник» и диалоговое окно команды «Расчет» – «Коэффициент запаса по прочности»
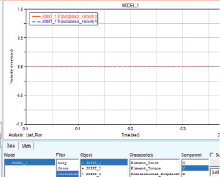
Важный элемент применения гидравлических систем – это упрощение контроля работы технологической машины за счет установки гидродатчиков давления в поршневые и штоковые полости гидроцилиндров [8]. По их показаниям можно не только отслеживать состояние самих гидроцилиндров [3], но и основных узлов технологической машины. Например, фиксация давления в гидростойках крепи позволяет установить параметры обрушения слоев кровли при подвигании лавы и уточнить такие параметры, как толщина слоев, их прочностные характеристики [8; 9], а по осцилограммам давления в гидроцилиндрах натяжения звездочек приводов установить особенности их зацепления с цепным тяговым органом, получить важные расчеты для моделирования приводов (рис. 4). Очевидно, что они информативны, так, по осцилограмме на рис. 4, г можно сказать, что она характеризует процесс зацепления звена цепи и звездочки, представляющий, по [10], большой интерес для исследователей приводов. Гидродатчики легко встраиваются в элементы горной машины. Осуществляют обратную связь системы управления со средой работы. Их применение решает многие проблемы разработки, и в частности устойчивости секций при отработке пластов крутого и наклонного падения, обеспечивает автоматизированное маневрирование секциями крепи при обходе геологических нарушений. В них функциональные возможности сочетаются с возможностями их регистрации не только собственных процессов, но и процессов узлов, с ними сочлененных, что является важным преимуществом по сравнению с другими системами.
Рис. 3. Схема расположения гидроцилиндров крепи типа «Глиник» и диалоговое окно команды «Расчет» – «Коэффициент запаса по прочности»

Рис. 4. Осциллографирование поворота приводного рештака с отображением на ноутбуке (а) и осциллографе (б) при угле поворота 30 ° (а, б) и натяжении цепи (в) при α = 90 ° с регистрацией давления в поршневых и штоковых полостях домкратов: 1 – датчик; 2 – приводной рештак; 3 – гидродомкрат; 4 – поворотный рештак; 5 – натяжной рештак с выдвижной платформой 6, домкратами 7, датчиками 8 и насосной станцией 9
Заключение
На основе пакета объектно ориентированного программирования Adams рассмотренны улучшенные режимы работы силовых гидроцилиндров, которые позволяют сочетать их рабочие функции с функциями непрерывного измерения параметров технологических машин. Так, перенос домкратов поворота 3 на рис. 4 в другие аналогичные зоны, где будут применяться поворотно-поступательные шарниры, позволит прогнозировать возможные в них нагрузки при работе конвейера, и в то же время он полностью будет выполнять их функции. Применение гидроцилиндров в системе передвижения агрегатов решает вопросы маневрирования забоем при обходе нарушений, а при выемке крутонаклонных пластов позволяет обеспечить направленное движение секций. Датчики измерения параметров машин и среды в гидроцилиндрах должны быть встраиваемыми на постоянной основе и использоваться для управления машинами.
Библиографическая ссылка
Бейсембаев К.М., Юрченко В.В., Малыбаев Н.С., Аманбаев А.Т., Тасболат Д.С. УЛУЧШЕНИЕ РАБОТЫ ГИДРОЦИЛИНДРОВ АГРЕГАТОВ // Научное обозрение. Технические науки. 2020. № 6. С. 5-10;URL: https://science-engineering.ru/en/article/view?id=1319 (дата обращения: 02.08.2026).
DOI: https://doi.org/10.17513/srts.1319