

 science-review.ru
science-review.ru
Scientific journal
Scientific Review. Technical science
ISSN 2500-0799
ПИ №ФС77-57440
INDUCTION MOTOR DESIGNS FOR MULTI-PHASE PHASE-POLE CONTROLLED AC ELECTRIC DRIVES

Многофазные инверторные электроприводы переменного тока (ЭП) обладают большими регулировочными возможностями, чем их трехфазные аналоги, за счет того, что при числе фаз системы ЭП более четырех появляется возможность для реализации ряда нетрадиционных алгоритмов управления преобразователями частоты (т.е. алгоритмов, которые в принципе не могут быть реализованы при числах фаз, меньших пяти). Использование этих алгоритмов позволяет улучшить ряд технико-экономических показателей ЭП и значительно расширить область их применения [1–3].
К числу таких нетрадиционных алгоритмов управления относится пропорционально-фазовое управление, разновидностью которого является фазно-полюсное управление (ФПУ). Использование ФПУ (в сочетании с классическим способом частотного регулирования скорости электродвигателя) в системе многофазного ЭП позволяет в ряде случаев уменьшить массогабаритные показатели и себестоимость изготовления системы, а также повысить ее быстродействие и надежность.
Целью данного исследования является изучение характеристик многофазного асинхронного двигателя (АД) в системе электропривода при использовании ФПУ и (на основе полученных результатов) разработка оптимальных конструкций АД, использование которых позволит применять ФПУ в системе ЭП с максимальной эффективностью.
Материалы и методы исследования
Объектом исследования является многофазная система асинхронного ЭП с числом фаз шесть и более, в которой наряду с традиционным частотным управлением применяется ФПУ.
Методы исследования – математическое и цифровое моделирование установившихся электромагнитных процессов, происходящих в многофазном асинхронном ЭП с ФПУ. При этом результаты моделирования сопоставляются с полученными ранее экспериментальными данными.
Результаты исследования и их обсуждение
Сущность ФПУ заключается в увеличении в некоторое целое число Hp раз фазовых смещений между напряжениями (токами) соседних фаз преобразователя частоты (ПЧ). Причем ФПУ может быть реализовано при строго определенных значениях числа m фаз ЭП. Множество значений параметра Hp, которые могут быть реализованы в системе, зависит от значения m.
Результаты проведенных исследований показали, что при переходе от традиционного управления (при котором Hp = 1) к ФПУ (при котором Hp > 1) наблюдается эффект, который можно отождествить с уменьшением в Hp раз числа фаз (mn) и одновременным увеличением во столько же раз числа пар полюсов (pn) в системе выходных напряжений (токов) ПЧ (рис. 1).
а) 
б) 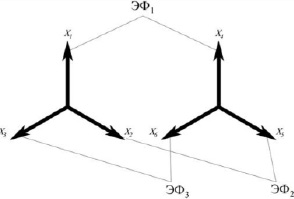
Рис. 1. Векторные диаграммы 6-фазной системы выходных напряжений (Х?) или токов ПЧ (? ∈ [1; 6]): а – Нр = 1, mn = 6, pn = 1; б – Нр = 2; mn = 3, pn = 2; ЭФj – j-я эквивалентная фаза ПЧ; j ∈ [1; 3]
Здесь под числом pn пар полюсов выходных напряжений (токов) ПЧ подразумевается количество идентичных подсистем, которые в совокупности представляют собой полную систему названных напряжений (токов) и в дальнейшем будут именоваться «полюсными подсистемами», а под числом mn фаз указанной системы (т.е. под эквивалентным числом фаз ПЧ, рис. 1) – число фаз одной полюсной подсистемы выходных напряжений (токов) ПЧ.
Таким образом, использование ФПУ в многофазных ЭП дает потенциальную возможность для изменения эквивалентного числа пар полюсов двигателя и тем самым для варьирования параметров механической характеристики машины (таких как синхронная скорость вращения, критический и пусковой моменты и др.), а посредством этого (в конечном счете) – для обеспечения названных выше преимуществ многофазных систем с ФПУ.
Кроме того, результаты проведенных исследований показали, что реализация ФПУ во многих случаях требует специального исполнения многофазного АД. Это объясняется следующим.
Анализ уравнений математических моделей многофазных систем ПЧ-ЭД [4] показывает, что необходимым условием для обеспечения возможности применения ФПУ является следующее: спектры функций взаимных индуктивностей (т.е. функций, описывающих изменение взаимных индуктивностей между фазными обмотками двигателя при изменении угла поворота ротора машины) должны содержать гармоники, порядки n которых удовлетворяют равенству
n / pk = Hp , (*)
где pk – число пар полюсов обмоток ЭД; конструктивный, нерегулируемый (в отличие от Hp) параметр. Равенство (*) должно выполняться для всего множества {Hp} значений параметра Hp, которые могут (при данном значении m) и должны быть обеспечены в данной системе ЭП.
При реализации ФПУ с нечетными значениями параметра Hp равенство (*) всегда выполняется, поскольку в спектрах функций взаимных индуктивностей ЭД всегда присутствуют гармоники, имеющие нечетные значения отношения (n / pk). Вследствие этого реализация вариантов ФПУ, при которых Hp принимает только нечетные значения (в определенной временной последовательности, заданной разработчиком системы ЭП или оператором), может быть осуществлена в многофазных системах ЭП при традиционном (классическом) исполнении как ЭД, так и ПЧ.
При четных значениях параметра Hp равенство (*) выполняется только в том случае, если фазные обмотки ЭД имеют укороченный шаг.
Проведенные исследования показали, что во многих случаях является целесообразной (с точки зрения регулировочных и ряда других характеристик ЭП) реализация таких вариантов ФПУ, в которых совместно используются как четные, так и нечетные значения параметра Hp (в определенной заданной временной последовательности). Реализация таких вариантов ФПУ требует исполнения ПЧ и (или) ЭД с некоторыми особенностями.
Принципиально возможные варианты исполнения ПЧ и ЭД, при которых возможна комплексная реализация как нечетных, так и четных значений параметра Hp, можно разделить на две группы (по характерным особенностям, свойственным названным вариантам, таблица).
Для первой группы вариантов характерно то, что в спектрах функций взаимных индуктивностей ЭД в этом случае присутствуют гармоники порядков, удовлетворяющих равенству (*) для всего множества значений параметра Hp, которые могут и должны быть реализованы в данной многофазной системе ЭП. В первую группу входят два варианта – варианты 1.1 и 1.2. По варианту 1.1 фазные обмотки ЭД выполняются с укороченным шагом (о возможности использования такого варианта упоминалось выше). Объединенная обмотка статора по варианту 1.2 фактически представляет собой две или более обмоток, имеющих разные значения числа пар полюсов и соединенных последовательно или параллельно. Недостатком обоих вариантов первой группы является низкий КПД системы ЭП вследствие значительных потерь мощность в ЭД.
Для второй группы, охватывающей варианты 2.1 и 2.2, характерно следующее. В обмотках классического типа каждый виток укладывается в два паза, в результате чего направления токов, протекающих по этим пазам, жестко связаны между собой. В вариантах 2.1 и 2.2 эти связи отсутствуют (для варианта 2.1 это становится очевидным, если рассматривать не реальные, а эквивалентные фазы обмотки ЭД). При этом, изменяя направление токов в проводниках, расположенных в разных пазах статора (или ротора) ЭД, можно добиться такого изменения конфигурации магнитного поля в воздушном зазоре машины, которое возможно в ЭД классической конструкции лишь при изменении числа пар полюсов, числа фаз или шага обмотки (без изменения числа фаз и числа пар полюсов ЭД).
Варианты исполнения ПЧ и ЭД для систем ЭП с ФПУ
|
Группы вариантов |
Варианты |
Краткая характеристика основных отличительных особенностей вариантов |
|
1 |
1.1 |
Фазные обмотки ЭД выполняются с укороченным шагом |
|
1.2 |
Обмотка статора представляет собой две или более обмоток, имеющих разные значения числа пар полюсов и соединенных последовательно или параллельно |
|
|
2 |
2.1 |
Обмотка статора ЭД – тороидальная. Ротор охватывает статор как снаружи, так и изнутри |
|
2.2 |
Обмотка статора ЭД – стержневая |
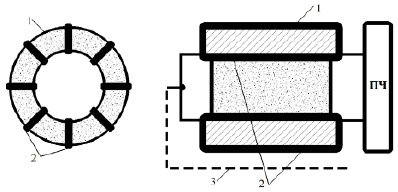
Рис. 2. 8-фазная статорная обмотка и схема ее подключения к ПЧ для ЭД, выполненного по варианту 2.1: 1 – магнитопровод статора; 2 – фазные обмотки статора; 3 – нулевой провод
Таким образом, в ЭД, выполненным по вариантам 2.1 и 2.2, имеется возможность для изменения числа эквивалентных фаз, числа эквивалентных пар полюсов, а также эквивалентного шага фазных обмоток, т.е. такие ЭД (как объекты регулирования) обладают большим количеством степеней свободы, чем машины классического типа. Причем с ростом числа реальных фаз ЭД (и, соответственно, ПЧ) число этих степеней свободы увеличивается.
В тороидальной обмотке по варианту 2.1 (рис. 2) каждая ее фаза укладывается в два паза: один – на внутренней, а другой – на внешней стороне статора (который может иметь или не иметь посредине, внутри своего массива кольцевой воздушный зазор в аксиальном направлении). Ротор охватывает статор как снаружи, так и изнутри. При такой конструкции суммарная длина лобовых частей обмоток ЭД может быть значительно уменьшена по сравнению с машинами классического типа, что является еще одним преимуществом данного варианта помимо отмеченного выше. Недостатком такого варианта ЭД является повышенный момент инерции ротора.
Стержневая обмотка статора ЭД по варианту 2.2 (рис. 3) выполняется так же, как и обмотка ротора асинхронного двигателя типа «беличья клетка», но в отличие от последней в стержневых статорных обмотках отсутствуют короткозамыкающие кольца (по крайней мере на одном торце статора), и каждый стержень такой обмотки подключается к отдельной фазе ПЧ (т.е. число стержней обмотки определяет число фаз ПЧ). Дополнительным преимуществом ЭД, изготовленных по варианту 2.2, является их высокая технологичность. Особенностью машин, выполненных в соответствии с этим вариантом, являются большие фазные токи ЭД при малых значениях фазных напряжений (по сравнению с ЭД той же мощности, имеющими обмотки классических типов).
При этом преобразователь частоты может быть построен следующим образом.
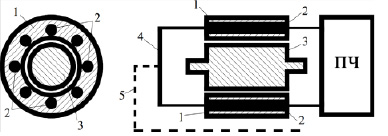
Рис. 3. 8-фазная статорная обмотка и схема ее подключения к ПЧ для ЭД, выполненного по варианту 2.2; 1 – магнитопровод статора; 2 – стержни статорной обмотки; 3 – ротор; 4 – короткозамыкающее кольцо; 5 – нулевой провод
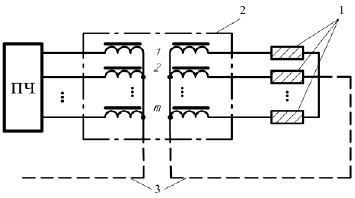
Рис. 4. Подключение статорной обмотки ЭД, выполненного по варианту 2.2.2, к ПЧ: 1 – стержни статорной обмотки; 2 – m-фазный понижающий трансформатор; 3 – нулевой провод
Вариант 2.2.1. ПЧ рассчитан на получение больших токов при малых напряжениях (по сравнению со случаем, когда ЭД имеет обмотку классического типа) без трансформации выходного напряжения преобразователя. Недостатками этого варианта (на сегодняшний день) являются большие массогабаритные показатели ПЧ и пониженный КПД системы ЭП вследствие больших потерь мощности на вентильных элементах ПЧ.
Вариант 2.2.2. (рис. 4). ПЧ выполняется по обычному принципу (т.е. рассчитан на «нормальные» выходные токи и напряжения), а на выходе ПЧ устанавливается понижающий трансформатор, число фаз которого равно числу фаз ПЧ, т.е. числу стержней обмотки статора. Недостатком этого варианта является необходимость использования выходного трансформатора, что может привести к ухудшению некоторых технико-экономических показателей системы ЭП (в частности, ее массогабаритных показателей).
Заключение
По результатам данной работы можно сделать следующие выводы. Проведенный сравнительный анализ всех перечисленных выше вариантов изготовления ПЧ и ЭД, предназначенных для использования в системах ЭП с ФПУ (когда параметр Hp может принимать четные значения), показывает, что варианты второй группы обладают наибольшими перспективами применения в данной области [5–7]. На сегодняшний день наибольшими преимуществами среди вариантов этой группы обладают варианты 2.1 и 2.2.2. Но непрерывное совершенствование преобразовательной техники (и в частности – силовой) в течение последних десятилетий позволяет обоснованно предположить, что с течением времени на первое место по перспективности применения может выйти вариант 2.2.1 (или по крайней мере вытеснить вариант 2.2.2).
Библиографическая ссылка
Бражников А.В., Савельев С.В., Куприянов Ф.М., Журавская А.В., Кузьмин А.Р. КОНСТРУКЦИИ ДВИГАТЕЛЕЙ ДЛЯ МНОГОФАЗНЫХ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ С ФАЗНО-ПОЛЮСНЫМ УПРАВЛЕНИЕМ // Научное обозрение. Технические науки. 2022. № 1. С. 34-39;URL: https://science-engineering.ru/en/article/view?id=1383 (дата обращения: 12.07.2026).
DOI: https://doi.org/10.17513/srts.1383