

 science-review.ru
science-review.ru
Scientific journal
Scientific Review. Technical science
ISSN 2500-0799
ПИ №ФС77-57440
CRITICAL OPERATION MODES OF THE INTEGRATED STARTER-GENERATOR

Развитие летательных аппаратов сегодня происходит в рамках концепций более электрического самолета (БЭС) и полностью электрического самолета (ПЭС) [1, 2]. В рамках этих концепций единственным видом энергии на борту ЛА становится электроэнергия, а ключевой технологией является интегрированный стартер-генератор (ИСГ). ИСГ отличается от традиционного стартера-генератора (СГ) тем, что располагается непосредственно внутри авиационного двигателя (АД). Пакет ротора ИСГ при этом напрямую соединен с ротором АД, за счет чего упраздняется центральная коническая передача (ЦКП) АД и, соответственно, становится возможным отказ от отбора механической мощности от ротора АД. Проектированию ИСГ посвящены работы [3–5]. В этих работах недостаточно глубоко рассматривается взаимное влияние параметров ИСГ и ТРДД при проектировании и при функционировании. В основном работы ограничиваются ограничением габаритных размеров ИСГ размерами свободной области внутри АД. Однако размещение ИСГ в ТРДД приводит к изменению параметров ТРДД. Более того, ТРДД имеет ряд существенных особенностей, которые необходимо учитывать при проектировании ИСГ с целью создания работоспособной конструкции ИСГ.
В статье автором рассматривается один из вопросов, который необходимо решить при проектировании ИСГ – определение критических режимов работы ИСГ. Исследования проводятся для ИСГ, интегрированного в двухконтурный турбореактивный двигатель (ТРДД). Решение о проектировании ИСГ для ТРДД было принято исходя из того, что ТРДД – самый распространенный тип АД на гражданских ЛА. Применение ТРДД с ИСГ на ЛА нового поколения позволит существенно повысить их экологичность и понизить топливную эффективность. Практическая реализация ИСГ возможна на текущем этапе развития технологий и материалов.
Целью исследования является определение критических для ИСГ режимов работы с точки зрения перемещений роторов ТРДД.
Материалы и методы исследования
Существует ряд научных работ, посвященных рассмотрению особенностей функционирования ТРДД. Как было отмечено ранее, в работах по разработке и проектированию ИСГ особенности ТРДД рассматриваются не в полном объеме. Пакет ротора ИСГ неподвижно закреплен на валу ИСГ, что необходимо учитывать при проектировании. Критические режимы работы ИСГ будут определены исходя из особенностей вращения роторов ТРДД.
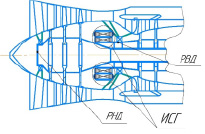
Рис. 1. Зона размещения ИСГ в ТРДД: РНД – ротор низкого давления, РВД – ротор высокого давления
Перед рассмотрением особенностей вращения роторов ТРДД остановимся на зоне размещения ИСГ в ТРДД. Зона размещения ИСГ в ТРДД представлена на рис. 1. ИСГ в ТРДД размещается перед первым подшипником РВД ТРДД. Пакет ротора ИСГ неподвижно закреплен на РВД, соответственно, частота вращения РВД совпадает с частотой вращения ИСГ.
ТРДД обычно выполняются двухвальными. На одном из валов размещены лопаточные машины низкого давления, что образует РНД, а на втором размещены лопаточные машины высокого давления, что образует РВД. РНД и РВД установлены на подшипниковых опорах, закрепленных на статоре ТРДД. РНД и РВД связаны между собой только газодинамически. При запуске ТРДД во вращение приводят РВД, после чего создаваемый поток газа раскручивает турбину, расположенную на РНД. Таким образом, вращения РНД и РВД связаны.
Роторы ТРДД перемещаются в осевом и в радиальном направлении. Пакет ротора ИСГ перемещается вместе с РВД, что потенциально может привести к изменению выходных параметров ИСГ, нарушению или потере работоспособности. Это влияет на безопасность полета ЛА. Возможность осевых перемещений роторов может закладываться при проектировании ТРДД для компенсации температурных воздействий. Осевые перемещения РВД обеспечиваются, например, за счет соединения РВД с шарикоподшипником ведущей шестерни центрального привода или за счет выполнения одного из подшипников РВД радиальным, воспринимающим только радиальные нагрузки [6]. Осевые перемещения РНД обеспечиваются за счет соединения с роликоподшипниками. Величина осевых перемещений зависит от типа ТРДД. Для АД ГТД-16 величина осевого перемещения ротора может составлять 0,2–0,4 мм [7]. В работе [8] рассматриваются смещения РВД на 10–15 мм, так как при таких осевых смещениях РВД может начаться повреждение лопаток турбины.
Также в ТРДД имеют место радиальные перемещения. Радиальные перемещения роторов обусловлены нагревом, центробежными силами, внутренним давлением, инерционными нагрузками и эволюционными перегрузками. Зазоры в проточных частях АД составляют десятые доли миллиметра, поэтому вышеперечисленные факторы обязательно учитываются при проектировании АД. Возникают радиальные перемещения роторов АД из-за деформации непосредственно роторов и из-за деформации опор и упругих элементов АД. Здесь необходимо отметить, что перегрузки и эволюции ЛА незначительно влияют на деформацию оси роторов (вызывают деформации порядка сотых долей миллиметра). В ТРДД перемещения РНД и РВД в опорах корпусов АД взаимосвязаны, поэтому рассматриваются совместно. В работе [9] авторами было получено, что максимальные перемещения роторов происходят вблизи опор ТРДД при режимах полета с наибольшими эволюциями ЛА. В рассмотренном в [8] примере максимальное радиальное перемещение РВД составило 0,67 мм. Необходимо отметить, что современные АД проектируются так, чтобы радиальные зазоры в них были минимальными. Для этого предусматриваются специальные меры пассивного и активного регулирования радиального воздушного зазора, необходимость которых обуславливается в том числе радиальными перемещениями роторов АД [10]. В целом необходимо отметить, что радиальные смещения в АД имеют сложный динамический характер [11] и зависят от температурного состояния АД, а температурное состояние АД, в свою очередь, меняется в зависимости от режима работы АД.
Осевое перемещение РВД может привести к сдвигу пакета ротора ИСГ относительно неподвижно закрепленного статора. В результате этого активная длина статора будет не полностью перекрываться активной длиной ротора (рис. 2, а).

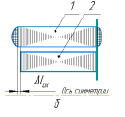
Рис. 2. Осевое перемещение пакета ротора ИСГ относительно статора: 1 – статор ИСГ; 2 – пакет ротора ИСГ
На рис. 2, а, эскизно показано смещение пакета ротора ИСГ относительно статора. Красным выделен участок пакета ротора ИСГ, который не перекрывается активной длиной статора. В нормальном состоянии активная длина статора ИСГ должна быть полностью перекрыта активной длиной ротора ИСГ. При смещении пакета ротора ИСГ относительно статора в осевом направлении электромагнитное поле будет стремиться вернуть пакет ротора к нормальному положению. Это потенциально может привести к возникновению осевых вибраций ТРДД, что также может привести к возникновению осевых колебаний РВД.
Для того, чтобы предложить меры по снижению влияния осевого перемещения пакета ротора ИСГ на выходные параметры ИСГ и на работу ТРДД, необходимо определить характер осевых перемещений роторов ТРДД. Осевые перемещения РВД происходят в связи с нагревом и остыванием ТРДД, что происходит при сменах режимов работы ТРДД, при эволюциях ЛА в пространстве, из-за несовершенств элементов ТРДД, полученных при сборке или приобретенных во время эксплуатации повреждений и т.д. Осевые перемещения, обусловленные, например, эволюциями ЛА во время полета, могут иметь кратковременный характер, поэтому их учет имеет сравнительно небольшую практическую значимость. Осевые перемещения, обусловленные, например, нагревом ТРДД, будут иметь длительный характер, так как в связи с выходом на определенный режим работы произошел нагрев ТРДД до определенной температуры и, соответственно, произошло осевое смещение ТРДД. Такой случай будет являться критическим режимом работы ИСГ с точки зрения осевого перемещения.
Очевидно, что безопасность полета ИСГ напрямую зависит от исправной работы ИСГ. Поэтому ИСГ должен обладать высокой надежностью. Соответственно, компенсация осевого перемещения пакета ротора ИСГ относительно статора путем введения дополнительных механизмов нецелесообразна. Компенсация осевого перемещения пакета ротора ИСГ относительно статора возможна путем увеличения активной длины статора на максимальную величину перемещения пакета ротора ИСГ в направлении этого перемещения (рис. 2, б). В таком случае активная длина пакета ротора ИСГ будет постоянно перекрыта активной длиной статора ИСГ. Недостатком предлагаемого решения является увеличение массы и габаритов ИСГ.
Для каждого конкретного ТРДД с ИСГ величина осевого перемещения пакета ротора ИСГ относительно статора ИСГ будет иметь различную величину. Поэтому для принятия решения о необходимости компенсировать воздушный зазор нужно определить величину и направление осевого перемещения для конкретного ТРДД, в который интегрируется ИСГ. Очевидно, что для малых относительно активной длины ИСГ перемещений, принимать меры по компенсации осевого перемещения пакета ротора ИСГ нецелесообразно.

Рис. 3. Эскиз изогнутого РВД с размещенным на нем пакетом ротора ИСГ: 1 – пакет ротора ИСГ, 2 – компрессор высокого давления, 3 – турбина высокого давления
Подробнее остановимся на радиальных перемещениях роторов ТРДД, которые необходимо учитывать при проектировании ИСГ. Радиальные перемещения роторов возникают по ряду причин: 1) на неуравновешенные массы роторов действуют центробежные силы; 2) имеются пульсации потока газа в камере сгорания (форсажной камере, реактивном сопле); 3) присутствует анизотропия корпусов; 4) имеются несовершенства подшипников качения и т.д. Более того, колебания роторов ТРДД могут происходить из-за их газодинамической связи, то есть вращение РНД будет влиять на колебания РВД, и наоборот. Из-за перечисленных выше факторов происходит изгиб роторов ТРДД, что является причиной их радиального перемещения. Изгиб роторов ТРДД имеет место при всех частотах вращения, однако существует частота вращения, при которой этот изгиб достигает наибольшего по величине значения. Такая частота вращения ротора ТРДД называется критической. Соответственно, с точки зрения учета радиальных перемещений роторов ТРДД необходимо рассматривать вращение РВД с расположенным на нем пакетом ротора ИСГ при критической частоте вращения. На рис. 3 эскизно изображен изогнутый РВД ТРДД с размещенным на нем пакетом ротора ИСГ.
Изгиб РВД, показанный на рис. 3, может привести к задеванию пакета ротора ИСГ о статор ИСГ, что может стать причиной повреждения ИСГ или его выхода из строя. Соответственно, необходимо проектировать ИСГ так, чтобы предотвратить задевание пакета ротора ИСГ о статор. Для этого необходимо определить наибольшую величину радиального перемещения РВД в месте крепления пакета ротора ИСГ.
С учетом сказанного ранее, максимальная величина радиального перемещения РВД будет наблюдаться при критической частоте вращения РВД. Существует ряд методик определения критической частоты вращения РВД аналитическими методами и методами компьютерного моделирования [12]. Однако существующие способы определения критической частоты вращения РВД ТРДД несправедливы для случая, когда на РВД размещен пакет ротора ИСГ, так как он приводит к изменению момента инерции РВД, смещению его центра масс. На пакет ротора ИСГ также действуют центробежные силы, гироскопический момент, момент от центробежных сил и момент от неуравновешенности РВД. Соответственно, при проектировании ИСГ возникает задача определения критической частоты вращения РВД. После решения задачи определения критической частоты вращения пакета ротора ИСГ можно будет решить задачу определения наибольшей величины радиального перемещения РВД в месте крепления пакета ротора на РВД.
Очевидно, что при проектировании ИСГ необходимо проводить сравнение наибольшей величины радиального перемещения и величины воздушного зазора. Для обеспечения безопасной работы ИСГ величина воздушного зазора должна быть больше максимальной величины перемещения РВД в месте крепления пакета ротора ИСГ.
Ранее было отмечено, что изгиб РВД имеет место на всех частотах вращения РВД. Поэтому целесообразно определить величину радиального перемещения РВД в месте крепления пакета ротора ИСГ на основных длительных режимах работы. Величина искомого радиального перемещения РВД при этом должна быть намного меньше величины воздушного зазора ИСГ. В таком случае выходные параметры ИСГ будут равны расчетным с учетом погрешности.
Результаты исследования и их обсуждение
Результаты проведенной работы показали, что при проектировании ИСГ необходимо решать ряд задач, обусловленных особенностями функционирования ТРДД. Так, например, перемещения роторов ТРДД могут привести к нарушению или потере работоспособности ИСГ. ТРДД с установленным в нем ИСГ является сложной системой, исследование которой представляет собой сложную инженерную задачу. Затруднениями при решении этой инженерной задачи выступают отсутствие ранее накопленного опыта проектирования и сложность верификации получаемых результатов. Поэтому проектирование ИСГ с учетом взаимного влияния параметров ИСГ и ТРДД требует формирования новых мультидисциплинарных подходов, создания новых методик аналитического расчета и компьютерного моделирования. Более того, проектирование ИСГ с учетом взаимного влияния параметров ИСГ и ТРДД требует нахождения новых способов верификации получаемых при проектировании результатов.
Заключение
В результате выполнения работы были определены критические режимы работы ИСГ с точки зрения радиальных и осевых перемещений РВД, предложены подходы к проектированию ИСГ, позволяющие обеспечить безопасное функционирование ИСГ. Было установлено, что компенсировать осевое перемещение РВД можно путем увеличения активной длины статора ИСГ в направлении конкретного рассматриваемого перемещения. Также было установлено, что для проектирования ИСГ необходимо определять величины радиальных перемещений РВД в месте крепления пакета ротора ИСГ при критической частоте вращения РВД и при частотах вращения РВД на основных режимах работы. Было выявлено, что для определения величины радиальных перемещений РВД в месте крепления пакета ротора ИСГ при критической частоте вращения РВД необходимо определить критическую частоту вращения РВД с учетом расположения на нем пакета ротора ИСГ.
Будущая работа автора будет направлена на определение критической частоты вращения РВД с учетом расположения на нем пакета ротора ИСГ.
Работа выполнена в рамках гранта в форме субсидий в области науки из бюджета Республики Башкортостан для государственной поддержки молодых ученых, тема «АП-ЭМ-02-21-ГБ».
Библиографическая ссылка
Уразбахтин Р.Р. КРИТИЧЕСКИЕ РЕЖИМЫ РАБОТЫ ИНТЕГРИРОВАННОГО СТАРТЕРА-ГЕНЕРАТОРА // Научное обозрение. Технические науки. 2022. № 3. С. 31-35;URL: https://science-engineering.ru/en/article/view?id=1397 (дата обращения: 27.07.2026).
DOI: https://doi.org/10.17513/srts.1397