

 science-review.ru
science-review.ru
Как известно, авиация – это всегда самые современные технологии и конструкционные материалы, в ней сочетаются красота и прочность конструкции при минимальном весе, но летательный аппарат – одно из самых сложных, дорогих, наукоемких творений рук человеческих.
Авиамоделизм – первая ступень овладения авиационной техникой, и он популярен во всем мире. О пользе занятий авиамоделизмом хорошо сказал Генеральный конструктор авиационной техники, Герой Социалистического труда, лауреат Ленинской и Государственной премий О.К. Антонов: «Модель самолета, даже самая маленькая – это самолет в миниатюре со всеми его свойствами, с его аэродинамикой, прочностью, конструкцией. Чтобы построить хорошую модель, нужно «кое-что» знать. Постройка модели сталкивает моделиста не с разносторонними науками, а с их взаимодействием. Тот, кто строил модели и не потерял к ним интерес, никогда не станет бюрократом в науке. Вот почему в нашем коллективе особенно ценят тех, кто занимался авиамоделизмом, кто с юности почувствовал технику с разных сторон, хотя бы и на первой ступени сложности. А за первой идут новые ступени, все выше, все дальше, для каждого, кто хочет шагать вперед».
Примером высших ступеней в авиамоделизме являются радиоуправляемые модели-копии самолетов. Так, трудоемкость постройки модели-копии самолета Ан-26 составляет 25 000 человеко-часов, а изготовление ее деталей и агрегатов обеспечено работой авиамоделистов по более чем 60 специальностям. Оценка же стоимости одного килограмма высокотехнологичной авиационной техники, которая составляет 1000 – 3000$, справедлива как для радиоуправляемой модели-копии самолета или радиоуправляемой пилотажной модели, так и для боевого самолета-истребителя поколения 4+.
К сожалению, в нашей стране, все чаще, возникают малозатратные кружки начального технического моделирования примитивного уровня. Деятельность подобных кружков не удовлетворяет современным требованиям к уровню научно-технического развития ребят, преемственности их практической подготовки, далека от современной техники, науки и в целом дискредитирует техническое творчество в глазах взрослеющих ребят, школьников и молодежи.
Представленная упрощенная методика проектирования дистанционно – пилотируемого летательного аппарата, имеющего большое сходство с радиоуправляемой моделью самолета, имеет целью обратить внимание старших школьников-авиамоделистов, и учащихся колледжей, на назревшую необходимость постепенного ухода от «потолочно-пенопластового» моделизма, к авиамоделизму и технологиям, которые могли прогнозировать незабываемые победы Авиамодельного спорта СССР на Чемпионатах мира, с использованием моделей, спроектированных нашими Чемпионами на строго научной основе.
Летательный аппарат «Горизонт»
Проектирование технических объектов (самолетов, ракет, автомобилей и т.д.), определяется Техническим Заданием (Т.З.), разрабатываемым «Заказчиком».
Проектируемый Летательный Аппарат (ЛА) предназначен для исследований приземных слоев атмосферы в интересах Гидрометеослужб (ГМС), которые могут быть наравне с сельскохозяйственными предприятиями – «Заказчиком» этого объекта.
Предположим, что «Заказчик» данного ЛА в соответствии с Т.З. определил следующие исходные данные:
1) крейсерская скорость Vk= 50 км/ч
2) высота полета Н= 1000 м
3) масса целевой нагрузки m ц н =2,0 кг.
4) полетная масса аппарата mо=6,5кг.
5) продолжительность полета Тпол ≥ ,5 ч.
1. Определение массовых параметров ЛА «Горизонт»
Первое приближение. Масса аппарата в первом приближении рассчитывается по формуле [1]:
mo = mк + mсу + mт + mоб упр + mц.н , (1)
где mo – взлетная масса; mк – масса конструкции; m с у. – масса силовой установки; mт – масса топлива; m обупр – масса оборудования и управления; m ц.н. – масса целевой нагрузки.
Разделим (1) на mo:
 ;
;
 ; (2)
; (2)
по статистике и опыту проектирования принимаем:
mк = 0,46;
m с у. = 0,09;
mт = 0,07;
m об упр = 0,075.
 кг;
кг;
(mо)I = 6,5 кг.;
масса распределится следующим образом:
mк = 3,0 кг;
m с у. = 0,585 кг;
mт = 0,455 кг;
m об упр = 0,5 кг.
Σmo = mк + m с у + mт + m об упр + m ц н =
= 3,0 + 0,585 + 0,455 + 0,5 + 2,0 = = 6,54 ≈ 6,5 кг;
mo= 6,5 кг. = 6500 г.
2. Определение основных геометрических параметров
2.1. Параметры крыла
Площадь крыла Sкр [2]:
Sкр = 0,0088 mo + 15,4 = 0,0088 · 6500 + 15,4 = 72,6 дм2;
Принимаем: Sкр = 70 дм2.
Средняя аэродинамическая хорда САХ –
Всах = 280 мм = 2,8 дм;
задаемся:
Всах =Ва = 2,8 дм;
тогда размах крыла
L = Sкр/Ba = 70/2,8 = 25 дм = 2500 мм;
L = 2500 мм;
Удлинение крыла
λ = L/ Ва = 2500/280 = 8,9;
Принимаем λ = 8.
Удельная нагрузка на крыло:
 г/дм2.
г/дм2.
2.2. Параметры горизонтального оперения
Плечо горизонтального оперения по статистике от размаха крыла Lг o [1]:
Lг o = 0,344 L = 0,344 · 2500=–860 мм = 8,6 дм.
Площадь горизонтального оперения по статистике от размаха крыла Sг.o.:
Sг o = 0,24 Sкр = 0,24 · 70 = 16,8 дм2;
Принимаем
Sг.o. = 17,0 дм2.
Размах lгo = 920 мм;
Поскольку горизонтальное оперение имеет трапециевидную форму, то хорды:
Вmах г о = 200 мм;
ВСАХго= Вmах г о + Bmin г о /2 = 185 мм.
Bmin г о = 170 мм.
Удлинение горизонтального оперения
λг о = 920/185 = 4,97 ≈ 5;
Принимаем λго = 5.
2.3. Коэффициент продольной устойчивости модели
Коэффициент продольной устойчивости ЛА весьма важная величина и зависит от площадей крыла и горизонтального оперения, а также от их взаимного положения.
 ;
;
где bа = Ва
Апр = Аг.о. = 0,75.
2.4. Число Рейнольдса
Число Рейнольдса в аэродинамике летающих моделей и самолетов дозвуковых скоростей играет очень большую роль. Оно характеризует отношение сил инерции воздуха к силам вязкости. Определим числа Рейнольдса при:
50 км/ч ≈ 13,6 м/с: Re = 69VBa = 69 · 13,6 · 280 = 262752;
72 км/ч ≈ 20 м/с: Re = 69VBa = 69 · 20 · 280 = 386400;
125 км/ч ≈ 35 м/с: Re = 69VBa = 69 · 35 · 280 = 676200;
Диапазон чисел Re (262752 – 676200) показывает, что аппарат в критическую зону чисел Re (10 000 – 200 000) не попадает. Режим обтекания закритический.
3. Потребная мощность силовой установки
Потребная мощность силовой установки Nn определяется по формуле [2]:
Nn = k· mо [л.с],
где k = 0,0001 для неманевренных Л.А (соответствует нашему аппарату); mо – полетная масса в I приближении;
Nn = 0,0001 · 6500 = 0,65 л.с;
Nдв ≥ Nn.
С целью обеспечения резерва мощности для более крутого взлета и при выполнении широкого спектра работ принимаем:
Nдв= 1,2 л.с;
Кроме двигателей импортного производства, возможно применение двигателя отечественного производства «Радуга-10кр», его и применяем.
4. Масса во втором приближении
Для определения массы аппарата во втором приближении, воспользуемся специальными номограммами (рис. 1, 2, 3, 4), из [2].
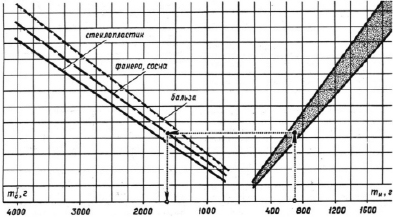
Рис. 1
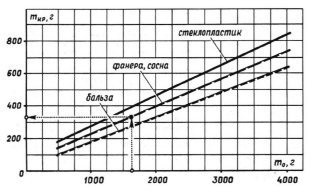
Рис. 2
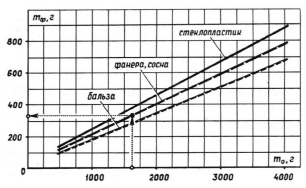
Рис. 3
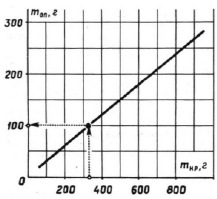
Рис.4
По статистике массы [2], по номограммам (рис. 1, 2, 3, 4):
mкр = 1280 г,
где mкр – масса крыла
mоп = 380 г,
где mоп – масса оперения
mф = 1400 г,
где mф – масса фюзеляжа.
Масса во втором приближении определяется по формуле
(mо)II = 1,15 mн + mкр + mф + mоп + nку,
где mн= mру + mCу + mтс + mш = 3000 г; mру – масса бортовой аппаратуры радиоуправления с источником питания; mCу – масса двигателя с воздушным винтом; mтс – масса топлива и топливной системы; mш – масса шасси, или иных взлетно-посадочных устройств; mн – определяется путем взвешивания данного оборудования; nку – количество каналов радиоуправления.
Для нас: nку = 8.
(mо)II = 1,15 · 3000 + 1280 + 1400 + 380 + 80 = 6,590;
(mо)II = 6,59 кг.
Из этой массы в соответствии с [2] :
Σmконстр = 3000 г;
(mо)II=6,590.
Принимаем массу во втором приближении:
(mо)II=6,500 кг.
Масса горизонтального оперения
m г.о.. = 270 г;
Масса вертикального оперения:
m в.о. = 110 г.
Параметры поверхностей управления и вертикального оперения:
а) Площадь вертикального оперения [1, 2]:
S = 0,117 Sкр = 0,117 · 70 = 8,19 дм2.
В mах в.о. = 2,26 дм; S форкиля = 0,43 дм;
B min в.о. = 1,64 дм; S фальшкиля = 0,86 дм.
L в.о.. = 2,6 дм.
б) Площадь руля направления:
S р.н.. = 0,016 дм2.
В mах = 0,09 м = 0,9 дм;
B min = 0,05 м = 0,5 дм;
l = 240 мм = 2,4 дм.
в) Площадь элерона:
S = 0,03 м2 = 3 дм2;
l = 3,8 дм;
В = 0,8 дм.
г) Площадь руля высоты:
S р.в. = 7,8 дм2;
L р.в. = 9,2 дм;
В mах р.в. = 1 дм;
B min р.в. = 0,7 дм.
5. Аэродинамический расчет
5.1. Построение поляры
Исходная поляра (рис. 7).
Определим Схвр не создающих подъемной силы элементов аппарата (табл. 1):
 .
.
Таблица 1
Параметры элементов, не создающих подъемной силы.
|
Элементы ЛА |
Sn (м2) |
Схn |
Sn · Схn |
|
|
Фюзеляж |
0,012 |
0,2 |
0,0024 |
0,003 |
|
Мотогондола |
0,006 |
0,1 |
0,0006 |
0,0008 |
|
Оперение |
0,26 |
0,02 |
0,0052 |
0,007 |
|
Прочие элементы |
0,0004 |
0,74 |
0,0003 |
0,0004 |
|
Итого: |
ΣСхвр |
0,0085 |
0,0112 |

С учетом интерференции Схвр увеличим на 15 %
С хвр =0.0112 · 1,15 = 0.013;
Величина индуктивного сопротивления:
 .
.
для λ = 8 строим поляру исходного крыла и Cy0 = f (α) (табл. 2), (рис. 10, 11);
Сх = Схпр + Сxi
Таблица 2
Зависимость Cxi от Cy
|
Су |
λ = 8 |
|
Схi, |
|
|
0 |
0 |
|
0,2 |
0,0015 |
|
0,4 |
0,0063 |
|
0,6 |
0,0140 |
|
0,8 |
0,0250 |
|
1,0 |
0,0390 |
|
1,2 |
0,0570 |
|
1,4 |
0,0770 |
|
1,6 |
0,1010 |
Таблица 3
Сводная таблица параметров для построения поляры проектируемого аппарата. Профиль крыла FX63137; λ = 8; Кmax =17,6 ; Схвр=0,013
|
αнв |
||||||||||||||||||
|
Cy |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
1,1 |
1,2 |
1,3 |
1,4 |
1,5 |
1,6 |
1,7 |
1,8 |
|
Vгп |
42,6 |
26,5 |
23,8 |
20,0 |
17,0 |
15,08 |
14,0 |
13,3 |
12,5 |
12,0 |
11,2 |
10,8 |
10,5 |
10,2 |
10,0 |
9,7 |
9,4 |
9,1 |
|
Re |
823032 |
511980 |
459816 |
386400 |
328440 |
291346 |
270400 |
256956 |
241500 |
231840 |
216384 |
208656 |
202860 |
1977064 |
193200 |
187404 |
181608 |
175812 |
|
Cр |
- |
0,0137 |
- |
0,0107 |
0,0095 |
- |
0,0075 |
- |
0,0085 |
- |
0,007 |
- |
0,004 |
- |
0,001 |
- |
- |
|
|
Cxi |
- |
0,0015 |
- |
0,0063 |
- |
0,0140 |
- |
0,0250 |
- |
0,0390 |
- |
0,0570 |
- |
0,0770 |
- |
0,1010 |
- |
- |
|
Cxвр |
- |
0,013 |
- |
0,013 |
- |
0,013 |
- |
0,013 |
- |
0,013 |
- |
0,013 |
- |
0,013 |
- |
0,013 |
- |
- |
|
ΣCx |
- |
0,0282 |
- |
0,03 |
- |
0,0365 |
- |
0,0455 |
- |
0,0605 |
- |
0,077 |
- |
0,094 |
- |
0,115 |
- |
- |
|
|
- |
0,32 |
- |
0,12 |
- |
0,068 |
- |
0,062 |
- |
0,06 |
- |
0,059 |
- |
0,057 |
- |
0,056 |
- |
- |
|
|
- |
1,12 |
- |
0,42 |
- |
0,24 |
- |
0,217 |
- |
0,21 |
- |
0,2 |
- |
0,2 |
- |
0,196 |
- |
|
|
|
- |
1,2 |
- |
0,456 |
- |
0,26 |
- |
0,24 |
- |
0,23 |
- |
0,22 |
- |
0,217 |
- |
0,21 |
- |
- |
|
|
- |
4,0 |
- |
1,5 |
- |
0,86 |
- |
0,79 |
- |
0.77 |
- |
0,75 |
- |
0.73 |
- |
0,72 |
- |
- |
|
Cxp+Cxi |
0.0175 |
0,0152 |
0,016 |
0,017 |
0,02 |
0,0235 |
0,0275 |
0,0325 |
0,04 |
0,0475 |
0,055 |
0,064 |
0,074 |
0,081 |
0,088 |
0,102 |
0,105 |
0,106 |
|
K |
- |
7,14 |
- |
13,1 |
- |
16,4 |
- |
17,6 |
16,5 |
- |
15,6 |
- |
14,1 |
- |
13,6 |
- |
||
|
α |
- |
-4° |
- |
-2° |
- |
0° |
- |
2,6° |
- |
5,2° |
- |
8° |
- |
12° |
- |
14° |
- |
- |




Строим параболу индуктивного сопротивления (рис. 10) CXi = f (Cy).
Откладываем величину Схр от параболы индуктивного сопротивления Cxi (λ = 8), получаем координаты поляры реального изолированного крыла с λ = 8 (рис. 10). Учитывая Схвр, переносим ось Су на величину Схвр=0,013;
Сх= Схкр+1,15 Схвр
Получим поляру аппарата в целом (табл. 3) (рис. 10). Проводим касательную к поляре аппарата и получаем:
 ;
;
 – максимальное аэродинамическое качество аппарата.
– максимальное аэродинамическое качество аппарата.
В связи с изменением λ изменяется и величина скоса потока
Знак (+) показывает, что угол скоса надо увеличить относительного исходного профиля. Полученное значение Δα = 2,3° откладываем против значения Су=1 вправо от оси, через полученную точку проводим прямую О. Кривую Cy0=–f(α) поворачиваем на угол Δα вправо (рис. 11). По полученной зависимости Cy0=–f(α) производим разметку углов α на поляре крыла с удлинением λ = 8, (Рис. 10); (Рис. 11). В точке касательной к поляре, находим αнв – наивыгоднейший угол атаки крыла, αнв= 2,6°.
По формуле k= определяем коэффициент k и результаты заносим в табл. 3.
определяем коэффициент k и результаты заносим в табл. 3.
Вне зоны критических чисел Re (10 000 – 200 000) kmin = 0,059, что соответствует «экономическому режиму» полета аппарата, при Cy = 1,2.
5.2. Скорость снижения аппарата
Вертикальная скорость Vy:
 .
.
Все данные заносим в табл. 3 при разных удельных нагрузках:
p = 71 г/дм2;
p = 93 г/дм2;
p = 100 г/дм2.
Строим скоростную поляру аппарата в режиме планирования (рис. 12), строим зависимости
K=f(α);  (рис. 13).
(рис. 13).
5.3. Проверочный расчет боковой устойчивости аппарата
 [3, 4];
[3, 4];
Полученное соотношение удовлетворяет условию, следовательно, боковая и поперечная устойчивость аппарата будут обеспечены.
5.4. Расчет дальности и продолжительности полета
 [км] [5];
[км] [5];
 [ч];
[ч];
 = 1 ч 10 мин;
= 1 ч 10 мин;
где Gт – количество топлива, см3 (V6aкa= 1000 см3); qч – часовой расход топлива см3/ч (qч = 858 см3/ч); V – скорость полета, м/с (V = 50 км/ч = 13,9 м/с)
 км.
км.
Продолжительность полета 1 час, с запасом топлива на 10 минут.
5.5. Потребная мощность для полета аппарата
Потребная мощность двигателя для различных высот полета [5] (табл. 4):
 л.с.;
л.с.;
 ,
,
где K= 17,6;  кг;
кг;
 ;
;
 м/с ≈ 50 км/ч;
м/с ≈ 50 км/ч;
 л.с.
л.с.
Без учета высоты и η в горизонтальном установившемся полете
 ;
;
Таблица 4
Сводная таблица параметров h,  , Nн
, Nн
|
h = 0,7Н, м |
|
Nн., л.с. |
|
0 |
1 |
0,062 |
|
100 |
0,997 |
0,06 |
|
500 |
0,974 |
0,06 |
|
1000 |
0,952 |
0,063 |
|
1500 |
0,930 |
0,064 |
|
2000 |
0,907 |
0,066 |
|
2500 |
0,883 |
0,068 |
|
3000 |
0,861 |
0,0696 |

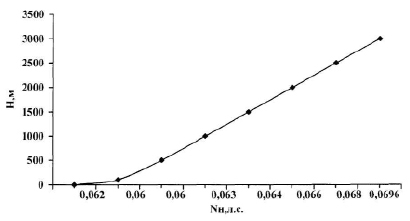
Рис. 5. График зависимости функции Nн = f (H)
5.6. Расчет максимальной скорости полета
P = X,  , Nр = 1,2 л.с.;
, Nр = 1,2 л.с.;
Расчет максимальной скорости [5] производится по формуле
 км/ч;
км/ч;
Vmax=133,7 км/ч;
при этом

ему соответствует Сx=0,028; аэродинамическое качество K= Су / Сx
К=0,2/0,028=–7,14.
5.7. Расчет максимальной высоты полета
N = 1,2 · 0,7 = 0,84 л.с; h = 0,7; G = 6,5 кг;
Р = 9,28 кг/м2; Су = 0,8; Сх = 0,0455.
А = 0,598 – коэффициент падения мощности.
Расчет максимальной высоты полета [5] производится по формуле
= 0,33 · 15,76 (1,696 – 0,27) = 7,2;
Величине f(H)=7,2 соответствует Н= 10000 м.
Запас мощности силовой установки позволяет набрать аппарату высоту до 10000 м. По условиям ТЗ эта высота должна быть ограничена. Принимаем Нmaх=3000 м.
6. Продольная балансировка и устойчивость аппарата в режиме планирования
6.1. Продольная балансировка и устойчивость
При САХ крыла = 280 мм = 0,28 м.
 .
.
Для прямоугольного крыла: Yт = 0,64
mzo кр = Сmo = – 0,15 коэффициент момента профиля FX 63137 (рис. 9, 16)
 .
.
Для плохо обтекаемых фюзеляжей kф = 0,9 [5]
a г.о. = 0,078; λ г.о. = 5.
Таблица 5
Параметры расчета продольной балансировки
|
Рассчитываемая величина |
Номера точек |
|||
|
1 |
2 |
3 |
4 |
|
|
Су |
0 |
0,2 |
0,4 |
0,8 |
|
α |
-7° |
-4° |
-2° |
2,6° |
|
Сх |
0,035 |
0,028 |
0,0305 |
0,0455 |
|
Cx1 = Сх – Су · α°/57,3 |
0,035 |
0,042 |
0,0445 |
0,0095 |
|
|
-0,13 |
-0,1 |
-0,084 |
-0,045 |
|
ε = 36,5Су/λ |
0 |
1,46 |
2,92 |
5,84 |
|
mz г.о. = – Аkфаг.о.(α – ε) при φ = 0 |
0,35 |
0,27 |
0,24 |
-0,16 |
|
mz = mz кp + mz г.о. |
0,22 |
0,17 |
0,156 |
-0,2 |

Строим графики mz = f(Cy) (рис. 15) и Су баланс = (φ г.о.) ( рис. 17).
Изменение момента при перестановке стабилизатора на 1° равно:
Δmz = – Аг.о.kфаг.о. = 0,75·0,9· 0,078 = – 0,053;
Δmz= 0,05.
Для балансировки аппарата на Су = 0,8 нужно стабилизатор с φ = 0° переставить в положение:
Из рис. 15 степень устойчивости на Су = 0,8 равна:
 .
.
Критическая задняя центровка аппарата:
 ;
;
 мм от передней кромки.
мм от передней кромки.
Положение фокуса аппарата
 ,
,
где  ;
;  ;
;  .
.

xf a сах = 124,6 мм от передней кромки крыла аппарата.
 fa – 0,1 = 0,445 – 0,1 = 0,345;
fa – 0,1 = 0,445 – 0,1 = 0,345;
Положение ц.т. хт = 96,6 мм от передней кромки крыла.
Критическая передняя центровка аппарата
 ;
;  т = 0,15;
т = 0,15;
 ;
;
 мм;
мм;
Диапазон центровок
 ;
;
(Хк.з. – Хк.п.) ВА =0,15 · 0,28 = 0,042 м;
 мм;
мм;
Δ ц.т. > 0.
ц.т. > 0.
Аппарат продольно устойчив.
6.2. Расчет балансировки аппарата в моторном полете
а) задаемся Су= 0,55; р = 93 г/дм2; V= 14 м/с; α уст= 0°; Р= 0,42 кг; Dвинта=0,3 м [5];
 м/с;
м/с;
Коэффициент нагрузки винта
 .
.
Ось винта +6°, наклон вбок вправо 2°
φв = 6° + α уст = 6° + 0° = 6°;
Доля горизонтального оперения обдуваемого винтом 
Для i = 0,55 снимаем с Cy= f (α) угол атаки в полете α = – 0,3°
Скос потока у оперения
момент от горизонтального оперения при j = –3,77°

= –0,75 · 0,9 ·0,078 (1 + 0,3 + 0,49) × (–0,3 – 4 – 0,3 – 3,77) = 0,48;
где  ° – скос потока после крыла.
° – скос потока после крыла.
б) зададимся Су = 0,8 и повторим V = 20 м/с; Р = 0,37 кг; α = 2,6°.
 ;
;
 ;
;
 ;
;
m z г.о.м = 0,75 · 0,9 ·0,078 (1 + 0,3 + 0,2) × (2,6 – 5,84 – 0,22 – 3,77) = –0,38;
Моменты от винта
Добавим коэффициент момента от винта. Этим смещаем mza=f(Cy) параллельно самой себе вниз mza(φ=6) =mza+mzp= близко к 0, (рис. 18).
Вывод: аппарат фактически сбалансирован на Су = 0,67
6.3. Моменты инерции аппарата
Момент инерции складывается:

Iz =0,074 кг/м•с2;
 кг/м•с2;
кг/м•с2;
Iх =0.068 кг/м•с2 ;

= 0,142 кг/м•с2
Iv =0.142 кг/м• с2.
Безразмерные моменты инерции относительно осей х, у, z:
 ;
;
 ;
;
 ;
;
6.4. Управляемость аппарата
Определяем раздельно потребные углы отклонения руля высоты для выхода аппарата на Сун.в., и преодоления моментов: демпфирования от запаздывания скоса потока и инерционного [5].
Исходные величины для расчета:
Аг.о.=0,75; V=15 м/с; q=14 кг/м2;
 ; So6д=0,3;
; So6д=0,3;
 ;
;
kм =kP(1 +  В) = 0,057(1 + 0,3· 0,38) = 0,06;
В) = 0,057(1 + 0,3· 0,38) = 0,06;
λг.о.=5; аг.о.=0,5; λ=8; Сαо у=0,56; Сαу=1,6;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
ba = 0,28;  ; Iz=0,074.
; Iz=0,074.
Потребный угол отклонения руля высоты
 ;
;
1) потребное отклонение руля высоты для выхода на Су н.в.
 ;
;
где  ;
;
 ;
;
 ;
;
2) потребное отклонение руля высоты для преодоления момента демпфирования:
 ;
;
При скорости V=15 м/с и радиусе разворота r=50 м
 рад/с;
рад/с;
 кг;
кг;
n = 4,5 перегрузка
 .
.
Потребное отклонение руля высоты:
 ;
;
 ;
;
3) потребное отклонение руля высоты для преодоления момента от запаздывания скоса потока. Принимаем скорость изменения угла атаки 2° в с ( рад/с) [5]
рад/с) [5]
 ;
;
4) потребное отклонение руля высоты для преодоления момента инерции аппарата

принимая условие: аппарат должен достигать угловой скорости ωz=2.5 рад/с за t=1 с [5].
Угловое ускорение равно
 рад/с2.
рад/с2.
Угол отклонения руля высоты
Суммарный угол:

 ;
;  ;
;
 .
.
Вывод: управляемость аппарата хорошая.
7. Расчет на прочность основных агрегатов и узлов аппарата
Для расчета аппарата на прочность принимаем:
Gвзл= 6,5 кг;
перегрузка разрушающая  ;
;
перегрузка эксплуатационная nуэ= 3;
коэффициент безопасности f = 1,5.
7.1. Расчет крыла
Определение погонной аэродинамической нагрузки:
 кг/м.
кг/м.
Определение погонной массовой нагрузки:
 кг/м.
кг/м.
Определение погонной суммарной нагрузки:
qΣ = qаэp+ qм= 13 + 2,56 = 10,44 кг/м;
Определение перерезывающих сил в сечениях и построение эпюры Q.
Q = qσ l;
Q1 = 10,44 · 1,2 = 12,5 кг;
Q2 = 10,44 · 0,8 = 8,35 кг;
Q3 = 10,44 · 0,4 = 4,18 кг;
Q4 = 10,44 · 0,2 = 2,09 кг;
Определение изгибающего момента в сечениях и построение эпюры Мизг:
 ;
;
 кг•м;
кг•м;
 кг•м;
кг•м;
 кг•м;
кг•м;
 кг•м.
кг•м.
Расчет сечений полок лонжеронов от Мизг по нормальным напряжениям.
Сечение 1
М1 = 7,5 кгм; Нср= 0,04 м;
 кг;
кг;
 см2;
см2;
 см2;
см2;
Сечение 2
М2=–3,3 кгм; Нср=0,04 м;
 кг;
кг;
 см2;
см2;
 см2;
см2;
Сечение 3
М3= –0,8 кгм; Нср=0,04 м;
 кг;
кг;
 см2;
см2;
 см2;
см2;
Сечение 4
М4=–0,2 кгм; Нср=0,04 м;
 кг;
кг;
 см2;
см2;
 см2;
см2;
Полки лонжерона крыла аппарата имеют следующие сечения:
Верхняя Нижняя
F1b=0,54 см2 F1h=0,23 см2
F2b=0,23 см2 F2h=0,1 см2
F3b=0,057 см2 F3h=0,024 см2
F4b=0,01 см2 F4h=0,06 см2
Конструктивно принимаем следующие размеры полок лонжерона:
В сечении №1:
верхняя Ав х Вв=10х6 мм;
нижняя Ан х Вн=10х4 мм.
В сечении №4:
верхняя Ав х Вв=10х4 мм;
нижняя Ан х Вн=10х3 мм.
Ширина A=Const=10 мм для всех полок.
Высота В – переменная:
с 6 до 4 мм – верхняя полка;
с 4 до 3 мм – нижняя полка.
Запас прочности по сравнению с расчетным в резерве.
Расчет стенок лонжерона на сдвиг от перерезывающей силы Q по касательным напряжениям:
Сечение 1
Q1= 12,5;  см2;
см2;
 см = 0,2 м;
см = 0,2 м;
 мм.
мм.
Конструктивно принимаем δсм= 1,2 мм в сечении №1, №2. Расчет сечений №2, №3, №4 не имеет смысла, так как Q2, Q3, Q4 меньше Q1 и толщина стенки получится меньше.
В сечениях №3 и №4 толщина стенки δ = 0,8 мм.
Расчет толщины обшивки крыла до лонжерона (образующими замкнутый контур) не имеет смысла, так как носок крыла обшивается бальзой толщиной явно больше расчетной.
7.2. Расчет переднего стыкового узла крыла
 кг;
кг;
1) проверка проушины на разрыв по сечению
Потребное сечение:
 мм2;
мм2;
Конструктивно имеем ΣF=18 мм2.
2) проверка пластины на разрыв по сечению
Потребное сечение:
 мм2;
мм2;
Имеем ΣF=18 мм2.
Конструктивно размеры проушины и пластины гораздо больше, чем это необходимо, следовательно, при таких нагрузках прочность узла гарантирована по всем видам деформаций.
3) расчет стыковочного болта на срез от силы 
 мм2;
мм2;
Потребная F = 2,5 мм2.
Имеем
 мм2,
мм2,
так как имеем две плоскости среза, то FΣ=19,6·2=–39,2 мм2, что гарантирует прочность узлов с большим запасом.
8. Описание конструкции аппарата
Малоразмерный летательный аппарат народно-хозяйственного применения «Горизонт» рис. 6 а, б выполнен по схеме моноплан с верхним расположением крыла и «Т» – образным оперением, с силовой установкой закрепленной на пилоне сверху крыла в месте его разъема. Шасси на аппарате отсутствуют, на фюзеляже для посадки на грунт и травяное покрытие предусмотрена лыжа.
Конструктивно аппарат представляет собой легкую деревянно-пластиковую конструкцию с широким использованием бальзы и композитов на основе стекло, и углеволокна.
Установка винтомоторной группы на пилоне, над крылом, позволила разместить в носовой части фюзеляжа целевую нагрузку, в том числе датчики, выводимые в невозмущенный поток воздуха впереди носовой части фюзеляжа. Это решение избавляет аппаратуру целевой нагрузки от вредных влияний на неё работы силовой установки и дает возможность обеспечить свободный доступ к аппаратуре.
Из необходимости повышения ресурса работы конструкции аппарата, с одновременным снижением затрат на ее изготовление, фюзеляж выполнялся наборным, состоящим из продольного набора – деревянных лонжеронов, а также поперечного набора – фанерных шпангоутов.
Сверху фюзеляж был обшит пластинами из бальзы на цианоакрилатном клее и покрыт специальной полимерной пленкой с возможностью ее термоусадки.
Носовая часть аппарата была снабжена съемным обтекателем, выклеенным по болванке из стеклоткани на эпоксидном связующем. В местах усилений фюзеляжа были применены детали из стеклопластика.
Крыло – наборной конструкции, выполнено по однолонжеронной схеме с задней стенкой. Продольным набором крыла являлись лонжероны, представляющие собой полки со стенкой. Полки выполнены из прямослойной сосны с усилением органоволокном на эпоксидном связующем.
Поперечным набором являлись нервюры из бальзовых пластин. Задняя стенка, к которой прикреплены узлы навески элеронов из алюминиевого сплава, как принадлежность продольного набора, также была усилена органоволокном на эпоксидном связующем. Крыло, имея специальные фрезерованные узлы, крепилось к узлам внутри фюзеляжа, выполненным из алюминиевого сплава, посредством винтов, образуя легкоразъемное в полевых условиях соединение. Разъем крыла у правой и левой боковин фюзеляжа производился путем отвинчивания двух винтов внутри фюзеляжа через специальные лючки с последующим удалением корневых частей крыла из гнезд его крепления.
Верхняя и нижняя поверхности носовых частей крыла до лонжерона с целью сохранения более точных теоретических обводов профиля крыла и повышения прочности были обшиты листовой бальзой. Обшивка всего крыла, верх и низ, выполнена из полимерной пленки типа «Ораковер» с возможностью ее термоусадки.
В местах стыка консолей разъемного крыла аппарата, система поперечного управления снабжена высокоточными узлами передачи усилий, легко расстыковывающимися в полевых условиях.
Горизонтальное оперение (ГО) выполнено наборным по однолонжеронной схеме со стенкой, на которую посредством специальных узлов навешивался руль высоты. Обшивалось ГО спереди до лонжерона пластинами из бальзы. Окончательно ГО обшивалось специальной полимерной пленкой «Ораковер» с возможностью ее термоусадки.
Вертикальное оперение (ВО) имело аналогичную конструкцию.
Мотогондола аппарата была выклеена из стеклоткани на эпоксидном связующем по болванке. Внутри мотогондолы на эпоксидном связующем установлены усиленные шпангоуты, связанные между собой лонжеронами. На одном из шпангоутов посредством стального крепежа закреплена, фрезерованная из дюралюминия, моторама. В пространстве за усиленными шпангоутами размещен цилиндрический топливный бак. Мотогондола с внутренними элементами и силовой установкой являлась отдельным легкозаменяемым модулем.
Аппарат был оснащен калильным двигателем рабочим объемом 10 см3 мощностью 1,2 л.с. закрепленным на мотораме внутри мотогондолы посредством винтов с амортизаторами. Топливный бак, емкостью до 1,0 л. располагался выше уровня жиклера, и топливо поступало в двигатель самотеком. Предусмотрена, была, принудительная подача топлива из бака в двигатель избыточным давлением, отбираемым из картера двигателя.
Управление аппаратом осуществлялось дистанционно комплектом пропорциональной радиоаппаратуры 9CAP Futaba. В её составе T9CAP PCM 1024 Futaba – передатчик и R149DP Futaba – приемник. Сигналы управления передавались по каналам курса, крена, тангажа, изменения режимов работы двигателя. Позднее для изменения режимов работы бортовой аппаратуры и целевой нагрузки, для обеспечения стабильного полета при выполнении задания в каналы управления по курсу, крену, тангажу были включены пьезогироскопы GY 240 по одному на каждый канал с соответствующей их настройкой при установке. Сервоприводы S3001 Futaba управления рулем высоты, рулем направления и целевой нагрузкой были размещены в фюзеляже на специальных амортизированных платах. Сервоприводы S3001 Futaba управления элеронами размещались в крыле.
В любой момент времени с целью проверок и отработок аппаратура могла быть включена.
Аппарат оснащался двухлопастным воздушным винтом диаметром O300 мм с шагом 120 мм.
В соответствии с проектом, аппарат имел отсек целевой нагрузки размером 400×100×80 мм. Отсек был предназначен для размещения:
1. Микротермометра с линией передачи данных.
2. Высотомера барометрического принципа действия.
3. Измерителя влажности воздуха.
4. Аппаратуры изокинетического отбора проб воздуха.
Выводы
В результате заданных данных:
Масса аппарата полетная
m0 = 6500 г = 6,5 кг.
Масса целевой нагрузки
mцн = 2000 г = 2,0 кг.
Были получены расчетные параметры аппарата:
Масса крыла
mкр = 1280 г = 1,280 кг.
Масса фюзеляжа
mф = 1400 г = 1,400 кг.
Масса оперения
mоп = 380 г = 0,380 кг.
Масса горизонтального оперения
mго = 270 г = 0,270 кг.
Масса вертикального оперения
mво = 110 г = 0,110 кг.
Масса конструкции аппарата
mконстр = 3000 г =3,000 кг.
Аэродинамический профиль крыла Wortmann FX 63 137.
Аэродинамический профиль ГО NACA 0009.
Аэродинамический профиль ВО NACA 0012.
Форма крыла в плане прямоугольная.
Площадь крыла S = 70 дм2.
Размах крыла L = 2500 мм.
САХ крыла САХ = 280 мм.
Удлинение крыла λ = 8
Угол установки крыла φ° = 0°
Площадь элерона Sэлер = 3,04 дм2
Длина элерона Lэлер = 380 мм.
Хорда элерона bэлер = 80 мм.
Форма ГО в плане трапециевидная
Площадь ГО Sго =17 дм2
Размах ГО Lго = 920 мм.
САХ ГО САХго =185 мм.
Максимальная хорда ГО bmax го = 200 мм.
Минимальная хорда ГО bmin го = 170 мм.
Удлинение ГО λго = 5
Площадь руля высоты (РВ) Sрв = 7,8дм2
Максимальная хорда РВ bmax рв = 100 мм.
Минимальная хорда РВ bmin рв = 70 мм.
Длина РВ Lрв = 920 мм.
Плечо оперения Lго = 860 мм.
Площадь ВО с учетом форкиля, фальшкиля и т.п. Sво = 8,19 дм2
Площадь форкиля, фальшкиля и т.п. Sфф = 3.19 дм2
Максимальная хорда ВО bmax во = 226 мм.
Минимальная хорда ВО bmin во = 164 мм.
Высота ВО Lво = 260 мм.
Площадь руля направления (РН) Sрн = 1,68 дм2
Максимальная хорда РН bmax рн = 90 мм.
Минимальная хорда РН bmin рн = 50 мм.
Высота РН Lрн = 240 мм.
В результате выполненных расчетно-графических работ по проектированию летательного аппарата «Горизонт», определены его геометрические параметры, произведен выбор типа и параметров силовой установки, произведен аэродинамический расчет и определены летно-технические характеристики аппарата, характеристики устойчивости, управляемости – получен материал для выполнения графической части эскизного проекта в объеме технического проекта.
Малоразмерный летательный аппарат народно-хозяйственного применения «Горизонт»
а

б
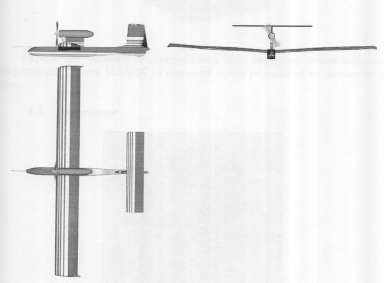
Рис. 6
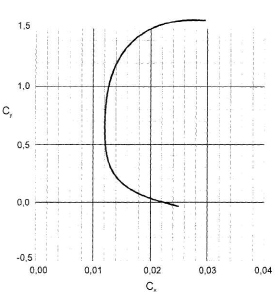
Рис. 7. Поляра профиля Wortmann FX 63–137
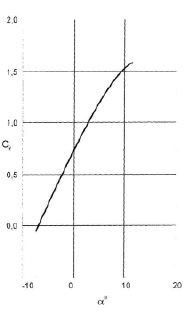
Рис. 8. Зависимость Cy от α
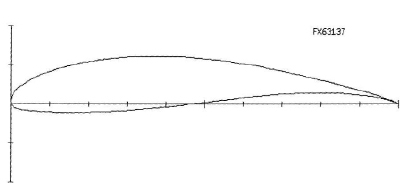
Рис. 9. Профиль Wortmann FX 63–137
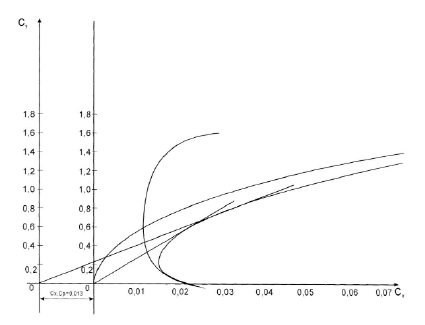
Рис. 10. Поляра проектируемого аппарата

Рис. 11. График зависимости Cy=f(α)
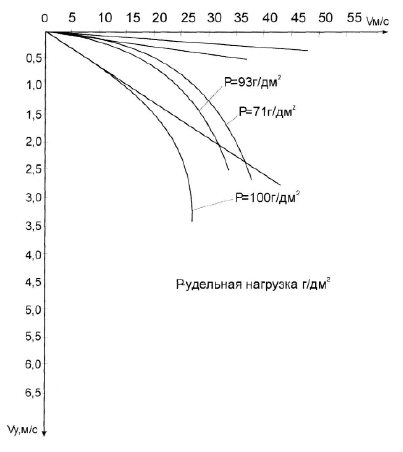
Рис. 12. Скоростная поляра в режиме планирования
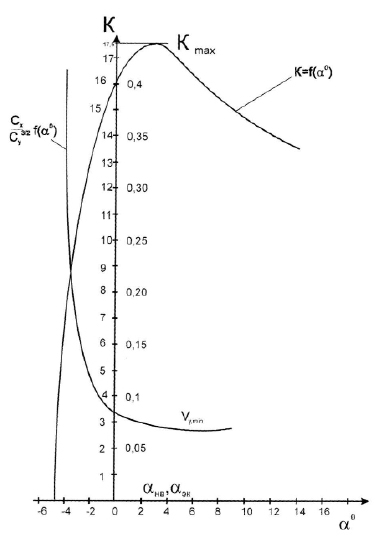
Рис. 13. График зависимости 
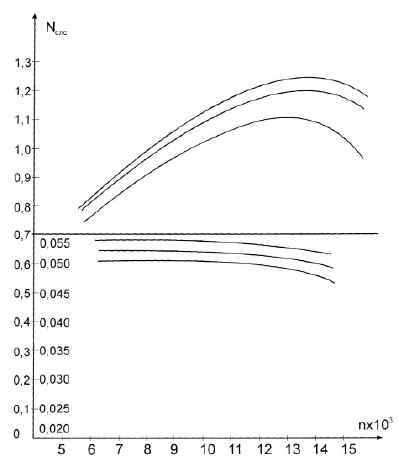
Рис. 14. Внешняя характеристика двигателя «Радуга-10ру»
График зависимости коэффициента момента mz=f(Cv).

Рис. 15. График зависимости mz крыла f(Cy), mz оперен f(Cy), mz аппарата f(Cy)
Центровка аппарата
|
№ п/п |
Наименование агрегата, груза |
G, кг |
X, м |
Gx |
Y, м |
Gy |
|
1 |
Крыло |
1,28 |
0,48 |
0,61 |
0,06 |
0,077 |
|
2 |
Фюзеляж |
1,4 |
0,61 |
0,85 |
0 |
0 |
|
3 |
Оперение |
0,38 |
1,31 |
0,5 |
0,15 |
0,057 |
|
4 |
Силовая установка и оборудование системы радиоуправления |
1,24 |
0,58 |
0,72 |
0,22 |
0,27 |
|
5 |
Энергоисточники |
0,2 |
0,52 |
0,1 |
0,02 |
0,004 |
|
6 |
Целевая нагрузка |
2,0 |
0,2 |
0,4 |
0 |
0 |
|
∑ |
6,5 |
∑Gx = 3,18 |
∑Gу = 0,838 |
 м;
м;  м.
м.
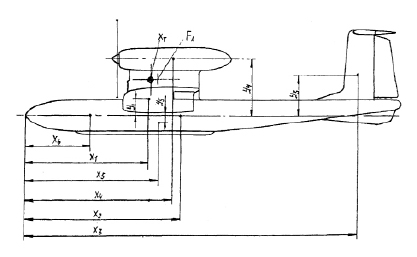
Рис. 16. Схема определения центра тяжести
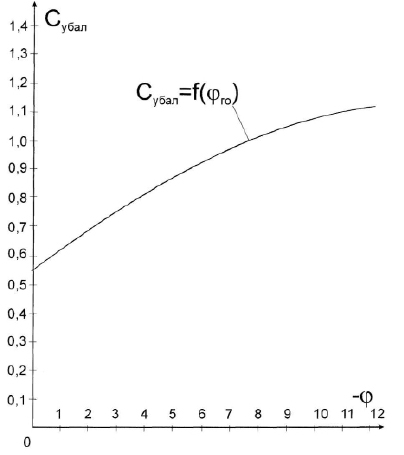
Рис. 17. График зависимости Су баланс=f(φ г.о.)
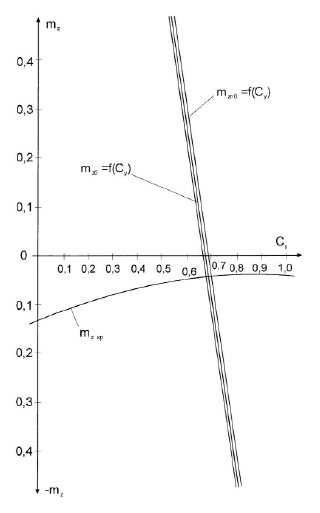
Рис. 18
Библиографическая ссылка
Воронков Ю.С. МАЛОРАЗМЕРНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ НАРОДНО-ХОЗЯЙСТВЕННОГО ПРИМЕНЕНИЯ «ГОРИЗОНТ» // Научное обозрение. Технические науки. 2017. № 1. С. 10-35;URL: https://science-engineering.ru/ru/article/view?id=1141 (дата обращения: 02.08.2026).