

 science-review.ru
science-review.ru
Выбор способа управления (машинное, дроссельное, машинно-дроссельное) для конкретного привода зависит от многих факторов, основными из которых являются циклограмма работы гидросистемы, количество регулируемых приводов и параметры нагрузки, действующей на рабочий орган. При проектировании гидросистемы задача выбора оптимального способа управления возникает после расчета основных параметров гидродвигателей – давлений и расходов в процессе работы оборудования на всех этапах цикла (быстрый подвод, замедленный подвод, быстрый отвод) [3]. На основании построенных диаграмм давлений и расходов выбирается оптимальный вариант насосного агрегата и клапана давления. По диаграмме расходов определяется производительность насоса, а по диаграмме давлений – максимальное давление напорного клапана . Оба эти параметра определяют гидравлическую мощность, затрачиваемую приводом в процессе работы. Если считать все способы управления гидродвигателями равноценными, с точки зрения выполнения требуемого для изготовления изделия технологического процесса, то главным критерием оптимальности следует считать минимальную гидравлическую мощность N = pк Qн , где pк – давление настройки напорного клапана, Qн – производительность насоса. Согласно приведенной формуле уменьшать гидравлическую мощность можно, уменьшая давление pк, производительность Qн, или давление и производительность.
Машинное управление. Достоинством машинного способа является высокий КПД гидросистемы, из-за отсутствия отвода избытков масла через напорный клапан при рабочем ходе. Недостатком – синхронное изменение скорости одновременно работающих гидродвигателей. Следует указать еще на один недостаток – невозможность применения машинного управления гидродвигателями, рабочие органы которых работают с переменными и знакопеременными нагрузками. Связано это с тем, что при этом способе давление в напорной линии гидродвигателя обеспечивает ему лишь одностороннюю жесткость. Отсутствие противодавления может привести к неравномерному движению рабочего органа при переменной нагрузке [2]. Установка гидравлического сопротивления в сливной линии (подпорного клапана) уменьшает неравномерность движения, но приводит к увеличению давления pк.
На рис. 1 изображен упрощенный вариант гидропривода с машинным управлением. Гидроцилиндр ГЦ1 перемещает рабочий орган станка в горизонтальной плоскости. Гидроцилиндр ГЦ2 перемещает другой рабочий орган в вертикальной плоскости, а клапаны КД и КО удерживают его после отключения гидросистемы. Для регулирования скорости рабочих органов применен регулируемый насос НР, а изменение давления достигается с помощью клапана КДП с пропорциональным управлением. При последовательной работе гидродвигателей ГЦ1 и ГЦ2 расходы Qн и давления pк, для каждого этапа цикла работы технологического оборудования, настраиваются системой управления СУ в соответствии с расчетными. Поэтому машинный способ в такой реализации является оптимальным. Ограничениями для его применения следует считать абсолютные значения и характер изменения нагрузок на рабочие органы в процессе работы оборудования. При параллельной работе скорости рабочих органов будут изменяться синхронно, а КДП будет настроен на расчетное давление одного из гидродвигателей.
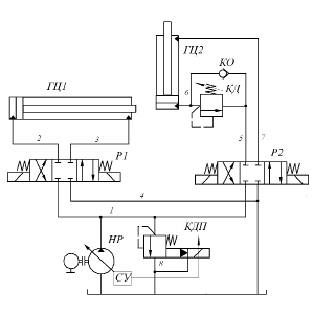
Рис. 1. Гидропривод с машинным управлением: НР – насос с регулируемой производительностью; КДП – клапан давления с пропорциональным управлением; СУ – система управления; Р1, Р2 – распределители 4/3; ГЦ1, ГЦ2 – гидроцилиндры; КД – клапан давления; КО – обратный клапан
Дроссельное управление. Основное достоинство этого вида управления – возможность создания гидросистем с несинхронным управлением несколькими гидродвигателями. Классический пример схемы с дроссельным управлением – насос постоянной производительности, клапан давления с ручной регулировкой, дроссели и регуляторы расхода в цепях управления гидродвигателями. В такой гидросистеме гидравлическая мощность – постоянная и максимальная, не зависящая от работы гидродвигателей. Снижение затрат энергии возможно за счет изменения давления pк. Чаще всего это реализуется применением гидроразгрузки одного или обоих насосов. Однако ступенчатое изменение производительности насоса Qн также дает положительный эффект (насосная установка типа Г48–4 [4]).
Дальнейшее уменьшение энергозатрат достигается применением автоматически регулируемого клапана давления КДП в насосной установке, рис. 2. Гидроцилиндр ГЦ1 приводит в движение рабочий орган (стол станка) со скоростями ускоренного подвода, отвода и рабочей подачи. На этапе рабочей подачи происходит обработка изделия, для реализации которой требуется максимальное давление в напорной линии ГЦ1. Во время ускоренного подвода и отвода изделия от инструмента давление в напорной линии цилиндра значительно меньше pк. Поэтому настройка клапана давления КДП на пониженное давление, в эти моменты работы оборудования, уменьшит затраты энергии.
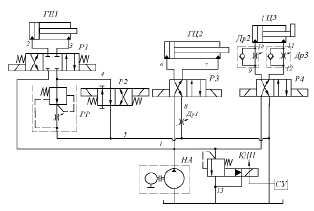
Рис. 2. Гидропривод с дроссельным управлением: НА – насосный агрегат; КДП – клапан давления с пропорциональным управлением; СУ – система управления; Р1… Р4 – гидрораспределители; ГЦ1… ГЦ3 – гидроцилиндры; РР – регулятор расхода; Др1 – дроссель; Др2, Др 3 – дроссели с обратным клапаном
Для работы цилиндров ГЦ2 (привод шторок) и ГЦ3 (переключение скоростей привода главного движения) тоже не требуется высокого давления. Следовательно, и на этом этапе цикла обработки изделия можно сэкономить, автоматически переналаживая давление pк.
Снижение энергозатрат при последовательной работе гидродвигателей очевидно. Но даже тогда, когда часть гидродвигателей работают одновременно, затраты энергии будут меньше, чем при использовании клапана давления с ручной регулировкой. В этом случае клапан КДП будет настраиваться по наибольшему давлению одного из цилиндров вспомогательного движения.
Машинно-дроссельное управление. В гидросистемах с таким управлением используются достоинства обоих способов – сравнительно высокий КПД машинного и возможность параллельной работы нескольких гидродвигателей, дроссельного.
Ступенчатое изменение подачи рабочей среды к гидродвигателям (машинное управление) достигается применением нескольких насосов, рис. 3. Скорость движения рабочих органов, приводимых цилиндрами, настраивается дросселями (дроссельное управление). В гидросистеме применены два насосных агрегата с насосами постоянной производительности НА1 и НА2. Каждый из насосов может подавать рабочую среду, либо в напорную линию, либо с помощью распределителей Р6, Р7, Р8 – в гидробак. Если объединить в группы гидродвигатели, работающие последовательно или параллельно, один раз за полный цикл обработки изделия, и подключить их к одному насосному агрегату, то появляется возможность отключать его на время простоя гидродвигателей.
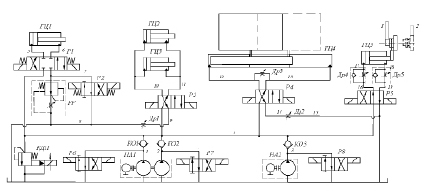
Рис. 3. Гидропривод с двумя насосными агрегатами: НА1, НА2 – насосные агрегаты; КДП – клапан давления с пропорциональным управлением; Р1… Р8 – гидрораспределители; ГЦ1… ГЦ5 – гидроцилиндры; РР – регулятор расхода; Др1… Др3 – дроссели; Др4, Др5– дроссели с обратным клапаном, КО1…КО3 – обратные клапаны
В приведенном примере гидроцилиндры ГЦ4 (привод шторок) и ГЦ5 (переключение блока зубчатых колес привода главного движения) работают в начале цикла обработки. После закрытия шторок, в зависимости от длительности цикла обработки, насосный агрегат НА2 можно выключить или разгрузить насос. Подключение всех насосов к общей напорной линии и их гидравлическая разгрузка позволяют оптимизировать работу гидросистемы – получать требуемые скорости рабочих органов с минимальными потерями энергии.
В гидроприводе, изображенном на рис. 4а, применен машинно-дроссельный способ управления. Производительность насоса НР сначала плавно уменьшается, рис. 4,б, от Q0 до 0,9 Qном при повышении давления от 0 до p1, после чего резко уменьшается до нуля, при незначительном повышении давления от p1 до p2, настраиваемого с помощью регулятора давления [4]. Поэтому применение такого насоса для гидросистем с машинно-дроссельным управлением экономически целесообразно, если при работе гидродвигателей давление в напорной линии будет, либо близким к нулю, либо в пределах p1… p2. Клапан КД применен в качестве предохранительного.
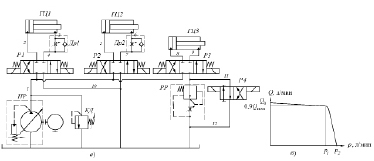
Рис. 4. Гидропривод с машинно-дроссельным управлением (а) и регулировочная характеристика насоса (б): НР – насос с автоматически регулируемой производительностью; КД – клапан давления; Р1… Р4 – гидрораспределители; ГЦ1… ГЦ3 – гидроцилиндры; РР – регулятор расхода; Др1, Др2 – дроссели с обратным клапаном; Q – производительность насоса; p – давление в гидросистеме
Давление в линии 1, определяемое работой цилиндра ГЦ3, при рабочем ходе стола станка (обработка изделия), как правило, высокое. На это давление и будет настроен регулятор давления насоса. Гидроцилиндры ГЦ1 и ГЦ2 приводят в движение вспомогательные органы станка. Требуемое для их работы давление ниже настроенного, а расход меньше подачи насоса. Поэтому, при последовательной работе этих приводов, из-за больших потерь на дросселях Др1, Др2, затрачиваемая гидравлическая мощность при движении рабочих органов вправо, будет больше расчетной. Оптимизировать работу такого гидропривода можно, если заменить насос НР и клапан КД, рис. 4, а на одну из насосных установок [1], чувствительных к нагрузке, или используемую в гидросистеме рис. 1.
Заключение
По результатам анализа, приведенных выше способов управления гидродвигателями, можно сделать следующие выводы.
Если по циклограмме работа всех гидродвигателей должна происходить последовательно, то применение машинного способа управления уменьшит потребление электроэнергии, нагрев рабочей среды и увеличит срок службы гидросистемы. При параллельной работе гидродвигателей применение машинного способа управления приведет к синхронному изменению скоростей всех гидродвигателей. Если это невозможно по условиям работы технологического оборудования, то следует применить дроссельное регулирование скорости, отдельно для каждого гидродвигателя. Если по циклограмме работы оборудования гидродвигатели управляются последовательно-параллельно, то применение машинно-дроссельного способа может быть в некоторых случаях оправдано (применение нескольких насосов или гидроагрегатов). Следует помнить о том, что управляемые машины значительно дороже неуправляемых.
При использовании дроссельного способа регулирования, для стабилизации скорости, можно использовать простой в обращении и недорогой аппарат – регулятор расхода (например, дроссель с редукционным клапаном). Для стабилизации скорости, при реализации машинного способа управления, необходима установка внешнего датчика скорости рабочего органа и передача данных через систему управления на управляемую гидромашину (насос).
Очень важным параметром циклограммы работы оборудования является время работы гидродвигателя на медленной скорости движения рабочего органа. Оно может тоже влиять на выбор способа управления гидродвигателями. В процессе работы гидродвигателя с медленной скоростью движения давление, как правило, поддерживается постоянным и максимальным (например, при обработке изделия на станке), а расход рабочей среды при этом минимальный. При дроссельном способе регулирования (насос постоянной производительности) в этом случае полезный расход (объем рабочей среды, требуемый для реализации медленной скорости рабочего органа) небольшой. Он может быть на порядок меньше производительности насоса. Это тот случай, когда машинный или машинно-дроссельный способ управления может быть эффективным. Но окончательный выбор способа (машинный, дроссельный, машинно-дроссельный) можно сделать только после тщательного расчета экономической эффективности работы оборудования в целом.
Библиографическая ссылка
Вольнов О.И. ВЫБОР ОПТИМАЛЬНОГО СПОСОБА УПРАВЛЕНИЯ ГИДРОДВИГАТЕЛЯМИ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ // Научное обозрение. Технические науки. 2017. № 2. С. 29-33;URL: https://science-engineering.ru/ru/article/view?id=1157 (дата обращения: 12.07.2026).