

 science-review.ru
science-review.ru
В последние десятилетия существенно уменьшилась возможность проведения необходимого числа экспедиций для изучения Мирового океана, как в России, так и за рубежом. Это связано в первую очередь с тем, что стоимость топлива для обеспечения плавания научно-исследовательских судов и судо – носителей привязных и автономных подводных аппаратов (АНПА) стала очень высокой, при этом работы только с одним аппаратом могут продолжаться месяцами, что определяет значительные эксплуатационные расходы. Они могут многократно возрастать, если потребуется проведение работ в различных акваториях десятками обычных АНПА с ограниченным сроком эксплуатации, требующим частых подъемов аппаратов на борт судна-носителя для подзарядки аккумуляторов. Поэтому повышение срока непрерывного действия (автономности) морских беспилотников является важнейшей задачей инвестиционной привлекательности, направленной как на расширение возможностей числа и типов самих средств морской робототехники, так и различных научных программ их применения. Существенное повышение автономности АНПА может быть достигнуто за счет комбинированных ВИЭ, установленных непосредственно на борту аппарата, а также путем использования для движения морских беспилотников различных видов энергии океана (солнца, волнения, ветра, температурного градиента). Неограниченные ресурсы различных видов морской возобновляемой энергии, в сочетании с новейшими разработками в области измерительной техники, гидроакустики, микроэлектроники, технологий связи и программного обеспечения позволяют создавать новые уникальные автономные многофункциональные технические средства освоения Мирового океана долговременного срока действия, а также обеспечить полную автоматизацию непрерывных наблюдений, сбора и обработки информации океанологических исследований [1]. Морские беспилотники повышенной автономности могут позволить эффективно, со значительно меньшими затратами проводить разнообразные океанологические исследования практически по всем научным направлениям, которые представлены в Институте океанологии им. П.П. Ширшова РАН, непрерывно и долговременно обеспечивая ученых необходимыми данными.
Цель исследования: для развития очень важно определить, какие научные программы возможно выполнять полностью с помощью АНПА длительной автономности, а для каких обязательно требуются научно-исследовательские суда. Отечественный опыт, необходимый для решения этих вопросов, пока отсутствует, поэтому целесообразно рассмотреть наиболее значимые примеры зарубежной практики использования поверхностных морских беспилотников для исследования Мирового океана. С этой целью очень полезен анализ научных программ, выполняемых одним из самых востребованных в настоящее время для исследований и мониторинга акваторий поверхностным беспилотником «Wave Glider» (рис. 1), созданным компанией «Liquid Robotics» (США). Для своего движения этот глайдер использует энергию колебаний поверхностного волнения, которое существенно уменьшается с глубиной [1, 2].

Рис. 1. Волновой глайдер «Wave Glider» в открытом океане
Волновой АНПА «Wave Glider» (рис. 2) состоит из поплавка (1) на поверхности и соединенного с ним тросом-кабелем (2) подводного глайдера (3), скользящего на глубине около 7 м.
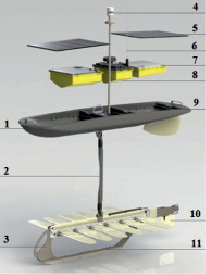
Рис. 2. Устройство волнового глайдера «Wave Glider»
Шесть поперечных крыльев, закреплённых шарнирно на подводном глайдере с несущей рамой (11), обеспечивают тяговую силу движения аппарата, который может развивать скорость до 2 узлов независимо от направления волнения. В корпусе поплавка (9) размещены два герметичных блока с электроникой (7) и блок с системой управления (8). Сверху каждого блока на поверхности поплавка установлены две панели солнечных элементов (5) со спутниковой антенной, а также короткая мачта между ними для гидрометеорологических датчиков (4) и система (6) автоматической идентификация (AIS). Для измерительных блоков, бортовой электроники и связи используются ионно-литиевые аккумуляторы, подзаряжаемые от солнечных элементов. Программное обеспечение позволяет оператору с судна или с берега управлять рулем глайдера (10) любого волнового беспилотника при помощи оснащенного интернетом компьютера с использованием спутниковой связи системы Iridium.
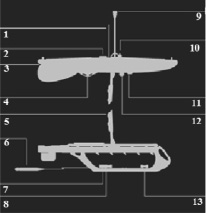
Рис. 3. Расположение основных датчиков и акустических приборов на волновом глайдере
На корпусе поплавка (рис. 3) кроме станции погоды (9) установлены волнограф (3), система AIS (1), антенна спутниковой связи (2), фотокамера (10), а под днищем – видеокамера (12), акустический доплеровский измеритель течений ADCP (4) и акустический телеметрический модем (11). В герметичном приборном боксе размещены система GPS, бортовой компас, система управления и навигации с точностью до 3 м. На несущей раме подводного глайдера закреплены датчики температуры (7), проводимости (8), флуометр (13) и гидрофон (6). Сессии спутниковой связи для уточнения местоположения и передачи данных или команд управления обычно проводятся через каждые 5 или 15 мин. При выполнении в океане различных миссий волновые глайдеры оказались очень надежными, проходя без остановки тысячи миль в течение полугода и более, иногда в очень суровых условиях при волнении более 7 м высотой и ветре более 50 узлов.
Физика океана и морей, климатология
По программе PACX (США) в 2012 г. четыре глайдера «WaveGlieder в автономном плавании из Сан-Франциско достигли Гавайских островов, затем два из них со скоростью в 0,7–1,0 узлов прошли через Тихий океан к берегам Японии, а два в Австралию. При этом обширная океанологическая информация с интервалом 10 мин поступала непрерывно от всех глайдеров в интернет в реальном масштабе времени, что делало ее доступной всем ученым мира на сайте Google Earth. На каждом АНПА проводилось измерение гидрометеорологических данных, волнения, течения, температуры воздуха и воды, солености, флуоресценции, содержания растворенного кислорода и хлорофилла, акустики поведении морских животных и рыб и т.п. За время плавания с острова Гавайи аппараты были в океане непрерывно более 300 дней, прошли в совокупности более 34000 морских миль и передали более 2,2 млн показаний своих датчиков с высоким разрешением [2]. Другим примером метеорологических и гидрофизических исследований является работа волновых глайдеров непосредственно в эпицентре ураганов, таких как сильнейший за последние 40 лет тайфун Rammasun, ураган Isaac и другие. При этом даже в центре «глаза» ураганов производились измерения температуры поверхностного воздуха, скорости и направления ветра, атмосферного давления, ветра, температуры и солености океана. Эти данные передавались в береговой Центр сбора данных в реальном масштабе времени для оперативного прогноза развития урагана. Поверхностные беспилотники эффективно используются также в высоких широтах. Так, Институт по изучению атмосферы и океанов (NOAA PMEL, США) с помощью двух «Wave Glider» провел 900000 измерений за два месяца работы в арктическом море Бофорта [3]. Основной задачей являлись экономически обоснованные устойчивые наблюдения в ледовых условиях температуры воздуха и воды в слое толщиной 6 м, вызванные аномально высокой температурой воздуха летом и осенью в течение последних шести лет. Такая картина наблюдалась на большой площади континентального шельфа, где обычно преобладали низкие температуры и морской лед. Использование глайдеров обошлось гораздо дешевле, чем работы традиционными судами. Океанские беспилотники широко используются также для других разнообразных гидрофизических и акустических измерений температуры, солености, скорости течений, турбулентности и т.п. Перспективной задачей для них является получение необходимых данных в районах, где по спутниковым данным было обнаружено цветение водорослей, загрязняющих воду и негативно влияющих на жизнь моллюсков, рыб, млекопитающих и птиц. Морские беспилотники в автономном плавании направляются в эти районы и проводят отбор проб воды и измерение уровня цветения с помощью датчика хлорофилла в режиме реального времени. В настоящее время во всем мире на суше размещено более 70 000 метеорологических станций, а во всех океанах не более 1200 станций, хотя именно процессы взаимодействия океана и атмосферы определяют глобальную погоду. Поэтому необходимо иметь в океане гораздо большее число различных метеорологических датчиков, но увеличение числа буев является очень дорогостоящей задачей. Спутниковые показания также не могут обеспечить устойчивое получение данных. Новым решением этой проблемы является сбор необходимых метеорологических и океанографических данных для улучшения моделей погоды и её прогнозирования с помощью сети относительно недорогих беспилотников, подобных «Wave Glider». Преимуществом использования беспилотников является также их большая надежность, возможность гибкой адаптации к меняющимся условиям и требованиям, непрерывное, длительное использование в течение года и более непосредственно в заданном районе путем динамического позиционирования, независимость от облачного покрова, возможность более точной предварительной обработки данных прямо в точке измерений. Кроме того, в отличие от буев, сети океанских беспилотников могут проводить распределенные пространственные измерения с передачей данных в реальном масштабе времени на больших площадях с дистанционным изменением конфигурации всей сети из Центра управления.
Исследования океанских течений
Компания Teldyne RDI оборудует различные морские суда по всему миру акустическими доплеровскими профилографами течений (ADCP) для выполнения двухмерного (по горизонтали и вертикали) измерения движения водных масс под поверхностью Мирового океана. Это позволяет получать данные о пространственных изменениях океана и атмосферы. Оказалось, что эксплуатация для этих целей поверхностных беспилотников гораздо эффективнее и дешевле [4]. Оснащение волновых глайдеров профилографами ADCP позволяет долговременно, непрерывно и более просто проводить океанологические исследования взаимодействия океанской и воздушной среды, отображать в реальном времени циркуляции потоков в труднодоступных, редко наблюдаемых районах океана. Появляется возможность дистанционной перенастройки ADCP непосредственно во время выполнения очередной научной программы, например для изменения периода усреднения при обработке данных или конфигурации текущего профиля. Полученные результаты могут быть также использованы для управления процессами рыбной ловли, индикации явления Эль-Ниньо и других задач мониторинга морской среды. Проверка точности акустических профилей, полученных ADCP, установленными под днищами поплавков беспилотников «Wave Glider», выполнялась компанией Teldyne RDI около острова Гавайи путем сравнения с показаниями донного контрольного ADCP. Полученные данные подтвердили эффективность беспилотников для акустического мониторинга. Испытания проводились при волнении высотой до 7 м.
Геология – природные катастрофы и опасные явления в Мировом океане
Ученые Института океанографии Скриппса (США) разработали проект глобального долговременного мониторинга землетрясений и предупреждения о цунами на базе глубоководной сети донных сейсмометров и постоянного накопления и ретрансляции данных от них на береговую базу в режиме реального времени, выполняемых поверхностными волновыми глайдерами (функция Data Centre& Gate Way) с помощью гидроакустических модемов [5]. Этот позволяет существенно экономить средства на проведение наблюдений по сравнению с традиционными судовыми методами. Расширив сеть сейсмографов и имея постоянно несколько глайдеров в заданных регионах океана, можно значительно увеличить зону глобального покрытия океанского дна и наиболее оперативно оценивать опасность наступления землетрясения или цунами (рис. 4).
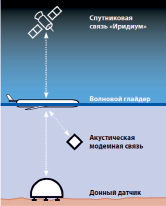
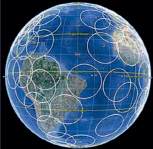
Рис. 4. Использование беспилотника «Wave Glider» по сейсмической программе: схема барражирования глайдера над сейсмографом (слева) и расширение глобальной зоны покрытия (справа)
Даже 10 минут раннего предупреждения о грядущем цунами могут иметь огромное значение для спасения населения прибрежных районов. Данные от такой сети будут использоваться также в проекте всемирных долговременных сейсмических наблюдений IDA (International Deployment of Accelerometers). Необходимость иметь системы обнаружения цунами стала ясна в 2011 г., после землетрясения Тохоку, в результате которого возникли гигантские волны, повредившие атомную электростанцию на Фукусиме и погубившие тысячи людей вдоль северо-восточного побережья Японии. В 1000 км южнее столицы Токио морской вулкан Nishinoshima в 2013 г. извергал десятки раз раскаленную лаву. Если произойдет обрушение скалистых склонов во время извержения, то это может вызвать смертельное цунами, которое достигло бы соседнего острова Огасавара в течение 20 минут. В 2017 г. вокруг вулкана Nishinoshima в течение трех месяцев была опробована система непрерывного мониторинга с использованием беспилотников «Wave Glider», которая подтвердила свою эффективность. Предполагается развернуть широкую сеть таких беспилотников в районах островов Японии, в которых находится свыше 10 % всех подводных вулканов в мире. Летом 2018 г. Гавайской вулканической обсерваторией Геологической службы США и Исследовательским институтом аквариумов Монтерей-Бей (MBARI) началось уникальное использование двух «Wave Gliders» для непрерывного сбора данных в режиме реального масштаба времени о динамике лавового потока, извергающегося в прибрежные воды из активного вулкана Kilauea, в экстремальных, не пригодных для людей, условиях высокой температуры воды и токсичных вулканических газов [6]. С этой целью волновые глайдеры, передвигающиеся галсами примерно на расстоянии 300 м от потока лавы, оснащены сложным комплексом метеорологических, океанологических и акустических датчиков, в частности измерителей температуры воды, уровня кислорода, уровня pH, солености, мутности и проводимости. Ученые из MBARI также разработали инновационную аппаратуру и программное обеспечение для отслеживания движения активных лавовых потоков с помощью постоянного измерения беспилотниками тепловых фронтов на основе горизонтального градиента приповерхностных температур. Эти исследования позволят определить, насколько далеко и глубоко лавовый поток распространяется под водой и как он может воздействовать на окружающие экосистемы.
Цикл углерода и геохимические процессы в океане
Для того, чтобы качественно прогнозировать изменения климата, необходимо непрерывно получать огромное количество данных о процессах взаимодействия океана и атмосферы. С этой целью требуется, в частности, увеличение пространственного и временного охвата наших наблюдений за обменом CO2, O2 и N2 на границе двух сред. Волновые планеры работают на поверхности и позволяют обеспечить долговременный мониторинг в удаленных районах морей и океанов, с отбором данных, которые ранее трудно было получить. Одним из подобных примеров являются постоянные измерения содержания углекислого газа водах Тихого океана на западе США, проводимые экологической лабораторией (PMEL) при NOAA с помощью «WaveGlieder» [2]. Получаемые данные очень важны также для обеспечения успешного выращивания устриц вдоль побережья.
Биология и экология морей и океанов, биологическая продуктивность
После крупной аварии нефтяной платформы компании BP, с помощью четырех волновых глайдеров «WaveGlieder», стал проводиться постоянный экологический мониторинг в Мексиканском заливе, контролируя многочисленными датчиками качество воды и содержание углеводородов, а также выполняя отслеживание морских млекопитающих с помощь акустической аппаратуры. Департамент сельского и лесного хозяйства и рыболовства (DAFF) в Южной Африке провел тестирование применения «Waid Glider» для исследования доступных рыбных запасов в своей исключительной экономической зоне, обширной акватории площадью около 1,5 млн км2. Рыболовство является жизненно важной частью местной экономики. Акустические исследования миграции рыбы всегда играли решающую роль в планировании использования этих ресурсов, установлении суммарного годового допустимого улова, помощи рыболовецким судам в поисках рыбы. Но использование судов для проведения таких гидроакустических исследований очень дорого, что ограничивает продолжительность и число морских экспедиций. Возможность длительно, непрерывно собирать данные о миграции рыб поверхностными беспилотниками позволяет решить эти экологические и экономические вопросы [7]. Совет научных и промышленных исследований (CSIR) совместно с DAFF в 2014 г. впервые с успехом использовал на беспилотниках «Wave Glider» многолучевые эхолоты SIMRAD совместно с метеорологическими и океанологическими датчиками для исследований климатических данных и запасов рыбы на маршруте в 121 км между островами Роббен и Дассен (рис. 5).
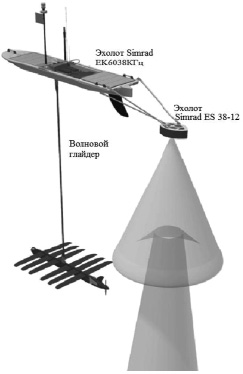
Рис. 5. Акустическая система беспилотника «Wave Glider» для исследования рыбных ресурсов
В последующие годы были проведены более длительные аналогичные исследования, показавшие, что помимо значительного повышения эффективности обследований пелагических рыбных запасов возможно использовать волновые глайдеры для оценки численности кормовых рыб и их распространение вокруг островов, где размножаются пингвины. CSIR успешно продемонстрировала, что флот Waid Gliders сможет длительно, непрерывно собирать акустические данные о промысле с гораздо меньшими общими затратами, что позволит местным государственным южноафриканским организациям лучше отслеживать рыбные запасы, управлять рыболовством и получить реальную экономическую и экологическую выгоду. Подобные долговременные программы изучения рыб и океанских животных (дельфинов, китов, атлантического лосося и других) с использованием волновых глайдеров выполняют ученые Института океанографии Скриппса. На обширной акватории залива Монтерей команда специалистов Стэнфордского университета (Stanford University’s Blue) и Морской станции Хопкинса (Marine Station, Hopkins) долговременно отслеживает глайдерами «Waid Gliders» больших белых акул, помеченных акустическими датчиками. Раньше такие исследования практически невозможно было выполнять, только тогда, когда акулы проходили непосредственно около стационарно установленных для этой цели буев. Ещё одним примером эффективного использования волновых глайдеров для морской биологии является проект Океанологического исследовательского центра (WSORC) годового мониторинга в режиме реального времени глубины и направления перемещения находящихся под угрозой исчезновения китовых акул в водах острова Utila (Гондурас). С этой целью на беспилотниках были установлены специальные гидрофоны, позволяющие принимать сигналы от любой акулы с акустической меткой, установленной на спинном плавнике и испускающей акустический импульс через каждую минуту [8]. Буксируемый беспилотником дополнительный двухчастотный эхолот BioSonics (70 кГц и 200 кГц) позволяет получать данные с высоким разрешением, которые могут быть основой для анализа различной информации: батиметрия, состав грунта (песок, ил или каменистый), количественных оценок биомассы рыб и другие организмов, наличие пограничных слоев в толще воды и т.д. Данные представляются в виде эхограмм, на которых время откладывается по горизонтальной оси, полученные величины по вертикальной оси, интенсивность акустических сигналов определяются соответствующей цветовой гаммой.
Правоохранительный контроль в морях и океанах
В настоящее время более одной пятой ежегодного глобального вылова рыбы, оцениваемого примерно в 23,5 млрд долл. США, используется незаконно, поскольку рыбаки превышают квоты, добывают рыбу в охраняемых районах или используют запрещенные методы, такие как дрифтерные сети или взрывчатку. Также наблюдается регулярный сброс судами в воду загрязняющих веществ и нефтепродуктов, который, по некоторым оценкам, достигает около 276 000 т в год, что равно половине объема нефти, попавшей в море во время катастрофы платформы Deepwater Horizon в Мексиканском заливе [9]. Обеспечение постоянного контроля за незаконным выловом рыбы и другими противоправными действиями на акваториях исключительной экономической зоны государств, а тем более в открытом океане, является очень дорогой и практически невыполнимой задачей. Например, стоимость эксплуатации корабля береговой охраны достигает 3000 долл. США в час, а пилотируемого экипажем самолета составляет более 10 000 долларов США за час полета. К тому же такими средствами осуществлять контроль незаметно для правонарушителей практически невозможно. Поэтому всё большее внимание привлекают малозаметные, бесшумные океанские беспилотники, способные обеспечить более гибкое и экономически эффективное патрулирование больших акваторий. Одним из примеров таких программ является многолетний проект Управления национальных морских заповедников NOAA (ONMS) использования волновых глайдеров для долгосрочного экологического мониторинга и охранного патрулирования сети подводных парков на акватории Гавайских островов и Американских Самоа в Тихом океане [10]. Широкому использованию волновых глайдеров и других технических средств морской робототехники способствует постоянное снижение затрат на их строительство и эксплуатацию, повышение скорости и снижение стоимости систем широкополосной спутниковой связи, совершенствование программного обеспечения беспилотников. Особые перспективы для обеспечения морского контроля открывает возможность длительной автономной работы десятков океанских глайдеров одновременно от нескольких месяцев до нескольких лет за счет использования солнечной энергии и различных видов возобновляемой энергии океана. Ожидается создание целых региональных парков морских воздушных, поверхностных и подводных патрульных беспилотников, способных на согласованные, взаимодополняющие действия.
Комплексное использование беспилотников
Летом 2018 г. поверхностные беспилотники, работающие в открытом океане примерно в 1000 морских милях от побережья Южной Калифорнии, обнаружили северо-тихоокеанский субтропический фронт – резкую границу, где холодные пресные воды с севера встречают теплые соленые воды с юга. Такие фронты являются очень интересными океанографическими явлениями, и для его изучения в этот район было отправлено научно-исследовательское судно «Falkor» американского Института океана Шмидта (Schmidt Ocean Institute), несущее на борту целую флотилию подводных, поверхностных и воздушных средств робототехники [11]. Целью экспедиции являлась демонстрация нового подхода океанологических исследований, основанного на совместном использовании распределенной сети различных типов океанских беспилотников для обнаружения, отслеживания и измерения сложных динамических процессов с высокой точностью в больших пространственных и временных масштабах. На месте в течение трех недель непрерывно работали поверхностные глайдеры, подводные беспилотники в сумме прошли более 1000 морских миль, а беспилотные летательные аппараты выполнили 25 полетов с общим временем в воздухе около 10 часов. Всё это позволило, вместо взятия точечных измерений с борта одного судна в одном месте, изучить с минимальными затратами гораздо большую площадь с высоким разрешением в пространстве и времени. Разработанное учеными новое программное обеспечение «Neptus and Ripples» и «Open Space Center» позволило им через интернет постоянно отслеживать и координировать всю сеть беспилотников в режиме реального времени, а также управлять научными программами всех средств автономной робототехники, работая непрерывно без остановок только с одним оператором. Полученные результаты экспедиции и практический опыт комплексного использования сети океанских беспилотников могут быть применены к другим важным направлениям океанологических исследований, таким как изменение климата, подкисление океана, оценка ресурсов рыбного промысла, загрязнение акваторий, ухудшение биологической среды обитания, экологическая безопасность от донной добычи полезных ископаемых и другим явлениям, влияющим на глобальную устойчивость Мирового океана.
Заключение
Проведенный анализ подтверждает большие функциональные возможности беспилотников «Wave Glider» и целесо-
образность инвестирования в проекты морской робототехники на базе возобновляемой энергетики океана. Это становится тем более актуально, если учитывать, что средний износ научно-исследовательских судов России превышает 80 % и что они могут оказаться в ближайшие годы полностью неработоспособными [1]. Наиболее эффективным выходом из создавшейся ситуации является ускоренное развитие океанских средств робототехники долговременной автономности и широкое внедрение элементов автоматизированной системы океанологических исследований на базе возобновляемой энергетики океана (АСОИ ЭО – Digital Ocean) [1]. Основная цель этой концепции ИО РАН – автономный, непрерывный, долговременный сбор, передача и накопление больших массивов (Big Data) океанских данных в реальном масштабе времени. Высокое качество моделей и прогнозов на базе таких массивов данных позволит получать уникальные научные результаты, а также предотвратить или сократить ущерб от природных и техногенных катастроф, сохранить жизнь многих людей и избежать многомиллиардных потерь. Возможность в масштабах всех заинтересованных ведомств страны, при выполнении наблюдений на шельфе и в океане, во многих случаях отказаться от использования морских судов, также может обеспечить снижение на сотни миллионов долларов эксплуатационных расходов и обеспечить переход к новой парадигме долговременных непрерывных автоматизированных глобальных наблюдений в Мировом океане с гораздо меньшими затратами и уникальными возможностями сбора, анализа, передачи и накопления информации.
Библиографическая ссылка
Горлов А.А. ОКЕАНОЛОГИЧЕСКИЕ ИССЛЕДОВАНИЯ ПОВЕРХНОСТНЫМИ БЕСПИЛОТНИКАМИ ПОВЫШЕННОЙ АВТОНОМНОСТИ // Научное обозрение. Технические науки. 2018. № 5. С. 5-13;URL: https://science-engineering.ru/ru/article/view?id=1195 (дата обращения: 27.07.2026).
DOI: https://doi.org/10.17513/srts.1195