

 science-review.ru
science-review.ru
Мировой океан богат различными биологическими, геологическими и другими природными ресурсами, а также он играет важнейшую роль в формировании глобального климата. Например, только в 2003 г. экономический ущерб от природных катастроф составил в США почти 30 % внутреннего валового продукта [1]. Для глобального прогнозирования климата и сохранения окружающей среды, а также обеспечения добычи полезных ископаемых и биологических ресурсов необходимо постоянное проведение широкого круга океанологических исследований. С этой целью используются различные технические средства – научно-исследовательские суда, поверхностные и притопленные буи, донные станции и обсерватории, дрифтеры, глайдеры, обитаемые и необитаемые телеуправляемые, буксируемые и автономные подводные аппараты (АНПА) [2]. Каждое из этих средств позволяет решить определенный круг научных задач, но, однако, имеет те или иные ограничения при использовании в суровой океанской среде. К ним могут относиться: недостаточная мобильность или маневренность, низкая чувствительность, малое пространственно-временное разрешение, большая зависимость от погодных условий, трудность и опасность частого развертывания и съемки и т.п. Многие научные задачи требуют возможности непрерывного долговременного мониторинга и быстрой, гибкой реакции на внезапное, но ожидаемое в процессе наблюдения событие, например появление какого-либо животного или начало геофизического процесса. Наилучшим образом всем перечисленным требованиям соответствуют АНПА, но они имеют относительно малую автономность, исчисляемую часами или сутками, после чего их необходимо поднимать на борт судна для подзарядки батарей. Кроме трудности и опасности выполнения спуско-подъемных работ в открытом океане, необходимость постоянного нахождения обеспечивающего судна в районе работы АНПА вызывает большие экспедиционные расходы, приблизительно составляющие до 30 тыс. долл. США в сутки [1, 3].
Часто многие важные научные данные необходимо получать в экстремальных погодных условиях, например выполнять измерения на границе океан – атмосфера во время урагана, для чего в настоящее время используются зонды, сбрасываемые с самолетов, что также очень дорого. Наиболее оптимально возможно проводить исследования согласно концепции «Цифровой океан» (Digital Ocean), в последние годы разрабатываемой Институтом океанографии Скриппса (США) и предполагающей комплексное использование всевозможных научных робототехнических средств и платформ с датчиками в различных районах океана. В Институте океанологии им. П.П. Ширшова РАН ещё в 2011 г. была выдвинута подобная, но более универсальная концепция автономной системы долговременных океанологических исследований на базе различных видов энергии океана (АСОИ ЭО) [3, 4]. Она направлена на долговременный непрерывный сбор, накопление и передачу больших массивов океанских данных (Big Data) в реальном масштабе времени, что невозможно сделать без постоянного энергоснабжения всех средств океанотехники. Такое решение позволяет проводить непрерывные долговременные исследования практически по всем океанским научным направлениям; обеспечить точные климатические прогнозы и предупреждения о природных катастрофах; выполнять постоянный мониторинг загрязнение океана и незаконного рыболовства и т.д. При этом на передний план выходят различные АНПА повышенной автономности, в частности с возможностью подзарядки от поверхностных или подводных док-станций [1, 3, 4]. Постоянное энергообеспечение АНПА позволяет устанавливать на них научное оборудование и измерительные датчики в десятки раз большей мощности, чем на обычные аппараты, или комплексно использовать различное оборудование. Такие беспилотники обеспечивают постоянное присутствие ученых в Мировом океане в течение нескольких месяцев или лет без обеспечивающих судов с дистанционным обменом информацией с береговыми центрами.
Целью исследования является изучение зарубежного опыта разработок, внедрения и эксплуатации АНПА с зарядными док-станциями в Мировом океане, что очень важно для развития отечественной концепции системы долговременных океанологических исследований АСОИ ЭО, предложенной ИО РАН [3, 4]. Долговременное использование АНПА позволяет значительно расширить круг научных задач и программ, а также обеспечивает возможность решения сложных, недоступных ранее проблем наблюдения процессов в океане. При этом находящимся удаленно на берегу или судах ученым обеспечивается возможность дистанционно, практически в реальном времени, вести океанские измерения и наблюдения, а также гибко менять научные миссии беспилотников. Поэтому целью исследования также является выявление и анализ немногочисленных ещё научных программ, выполненных за рубежом с помощью новых, робототехнических и цифровых технологий, без использования научно-исследовательских судов.
Материалы и методы исследования
Методы океанологических исследований определяются использованием имеющихся для этого технических средств. В соответствии с разрабатываемой ИО РАН концепцией автономной системы долговременных океанологических исследований (АСОИ ЭО), в основе новых методов изучения Мирового океана лежит широкое использование различных средств робототехники повышенной автономности [3, 4]. Такие методы позволяют выполнять недоступные ранее научные программы, направленные на долговременное непрерывное накопление больших массивов океанских цифровых данных. В предыдущих статьях журнала, в рамках концепции АСОИ ЭО, нами были рассмотрены методы исследований поверхностными морскими беспилотниками, а также с использованием стационарных узловых измерительных платформ (СУП) на базе возобновляемой энергии океана. В настоящей статье рассматриваются методы исследований за счет мобильных АНПА, подзаряжаемых от док-станций [1, 3, 4].
За рубежом первый автономный необитаемый аппарат для глубоководных океанологических исследований, АНПА «Odyssey I», был создан в США в Лаборатории Массачусетского технологического института (AUV Lab MIT) при участии Океанографического института Вудс-Хоула (WHOI) [5]. Этот проект финансировался за счет Морского гранта (Sea Grant), Национального научного фонда (NSF) и Национального управления океанических и атмосферных исследований (NOAA) . Рабочая глубина аппарата составляет 6000 м, масса 195 кг, длина 2,15 м и диаметр 0,59 м. В 1994 г. на его основе был создан АНПА «Odyssey II» (рис. 1, а) с улучшенными характеристиками и низкой стоимостью (75 тыс. долл. США). В корпусе аппарата были установлены различные датчики и акустическая цифровая связь, а управление всеми системами и навигация осуществлялись бортовым компьютером, позволявшим по желанию оператора изменять научные программы (миссии).

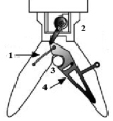
Рис. 1. Автономный необитаемый аппарат «Odyssey-II» (а) и стыковочный захват, установленный в носовой части АНПА (1 – пружина защелки захвата, 2 – привод защелки, 3 – стыковочный стержень док-станции, 4 – защелка захвата)
Первые погружения этого аппарата с научными целями были проведены в Арктике (море Боффорта), а затем над гидротермальными выходами района Хуан-де-Фука. Далее были созданы новые модификации АНПА «Odyssey II», которые оказались простыми, надежными и успешно использовались для океанологических исследований. Например, в 1996 г. два таких аппарата, с установленными на них датчиками качества воды, измерителями скорости течения и гидролокаторами бокового обзора в течение 21 суток изучали динамику фронтального перемешивания в проливе Haro Strait у острова Ванкувер. В течение 1997–2000 гг. AUV Lab MIT, совместно с WHOI, начали внедрение автономной сети отбора проб в океане (AOSN), концепция которой, изначально разработанная с участием Института Океанографии Скриппса, предполагает использование различных АНПА на полигонах расположения стационарного подводного научного оборудования, объединенного оптико-волоконным кабелем электроснабжения сети и передачи информации на береговой Центр [6]. Для проведения долговременных пространственно-временных измерений в районе её размещения, было запланировано использование нескольких АНПА с разработанной в WHOI автономной зарядной док-станцией, подвешенной на кабель-тросе под поверхностным буем [7]. В состав станции входили бортовые аккумуляторные батареи, микропроцессорная система связи и управления, гидроакустический маяк (пингер) для её обнаружения аппаратом и механизм захвата АНПА, перемещающийся по закрепленной на тросе металлической штанге. Самонаведение АНПА «Odyssey II» на док-станцию обеспечивалось его акустической системой с ультракороткой базой (USBL) с расстояния до 1 км. В случае, если АНПА не смог состыковаться с первого раза, он уходил от станции и снова повторял попытку. Стыковка осуществлялась за счет механической V-образной защелки захвата, закрепленного на носу аппарата (рис. 1, б). После надежного зацепления производилось выравнивание сердечников индуктивной бесконтактной передачи, установленных на АНПА и на док-станции, и начиналась подзарядка аккумуляторных батарей аппарата и передача с него полученных данных в устройства памяти док-станции, а также загрузка в него новой программы исследований. В состыкованном состоянии АНПА и док-станция образовывали единую систему с общим информационным интерфейсом. С док-станции данные исследований подавались на буй обеспечения, а с него через спутник на береговую базу. После завершения зарядки АНПА оставался в док-станции до сигнала о начале выполнения следующей миссии. Тогда захват, перемещаясь по штанге, освобождал аппарат, электромотор раскрывал защелку (рис. 1, б) и АНПА уходил от док-станции, которая по акустической связи продолжала отслеживать его путь до возвращения назад. Автономность станции составляла 4 месяца при мощности её батарей около 60 кВт-ч, что обеспечивало за это время выполнение не менее 12 научных миссий АНПА по 12 ч каждая. Натурные испытания системы АНПА «Odyssey II» с зарядной док-станцией были успешно проведены в разных акваториях, в том числе в 1998–2000 гг. в Лабрадорском море и заливе Монтерей, и продемонстрировали эффективность такого способа научных исследований. Однако недостатком конструкции рассмотренного проекта являлось большое количество механических элементов системы стыковки.
Сеть океанических обсерваторий OOI
Для дальнейших разработок концепции кабельных океанологических сетей AOSN, новых АНПА и зарядных док-станций следующего поколения специалисты AUV Lab MIT и WHOI, находящиеся на атлантическом побережье, установили научно-техническое содружество с океанологами Международного научно-исследовательского института аквариума Монтерей-Бей (MBARI) на тихоокеанском побережье США. В результате этого были созданы и стали широко использоваться для научных работ серии АНПА «Odyssey», «Tethys», «Bluefin», «SeaBED» и других, а также новые типы док-станции для них. С целью внедрения этих новых технологий в практику океанологических исследований в WHOI был образован Центр морской робототехники.
Концепция AOSN активно развивалась в WHOI путем создания в различных районах сети океанических обсерваторий (OOI), что позволило перейти от эпизодических научных судовых экспедиций к постоянному присутствию ученых в Мировом океане [8]. Сети OOI представляют собой поверхностные буи и подводные платформы с датчиками и оборудованием для наблюдения и изучения физических, химических, геологических и биологических процессов в толще океана, на его дне и на границе океан – атмосфера. Это дает возможность более глубокого понимания и решения многих важнейших проблем, таких, как изменение климата, изменчивость экосистем, подкисление океана, круговорот углерода и т.д. Интеграция отдельных OOI в единую глобальную систему распределенных наблюдений обеспечит всем ученым мира в любое время свободный доступ к получаемым данным через интернет в режиме, близком к реальному времени, что станет новой парадигмой океанологических исследований. Например, через каждые три часа с участка дна, находящегося на глубине около 1,8 км в 500 км от побережья США, любой желающий может наблюдать in situ факелы гидротермальных выходов и животных вокруг них. Одновременно с этим происходит постоянная видеозапись происходящего. Такие решения по мере развития технологий измерений, IT-технологий, различных каналов связи, миниатюризации морской робототехники и т.п., будут открывать дополнительные возможности для дистанционного выполнения всё новых океанологических исследований и открытий.
Финансирование развития сети OOI в США осуществляется Национальным научным фондом (NSF). С конца 2009 г., за первые пять лет расходы на внедрение сети OOI составили 106 млн долл. США, на следующем этапе по 55 млн долл. США в год и начиная с 2019 г. ежегодно около 44 млн долл. США. Общая координация и управление сетью OOI осуществляется из WHOI. К настоящему времени эта сеть уже охватывает шесть районов, расположенных в Тихом океане, Северной и Южной Атлантике, Инфраструктура OOI состоит из 83 платформ с более 830 единицами научного оборудования на них, что позволяет непрерывно получать свыше 100 000 данных.
Технологии долговременных научных исследований института WHOI
Компанией «Hydroid» при участии океанологов WHOI было разработано семейство компактных и надежных АНПА «REMUS» (Remote Environmental Monitoring Unit System) с рабочими глубинами 100, 600 и 6000 м. Для научных исследований в прибрежных районах широко использовался АНПА «REMUS-100» массой 37 кг, длиной 1,6 м и диаметром 19 см. Базовая цена этого аппарата составила около 175 тыс. долл. США. Бортовая литиево-ионная батарея мощностью в 1 кВт-ч обеспечивала 22 ч автономности аппарата при средней скорости хода 1,5 м/с. На типовом АНПА «REMUS-100» был установлен двухчастотный гидролокатор бокового обзора, акустический доплеровский профилограф течений (ADCP), датчики CTD и оптических свойств водной среды. Точность движения аппарата обеспечивалась системой GPS, гидроакустическими навигационными системами с длинной и ультракороткой базами, доплеровским лагом, гирокомпасом, датчиками курса и угловых скоростей. В зависимости от научной миссии на аппарат могут быть дополнительно установлены датчики биолюминесценции, флюорометр, радиометр, насос для забора планктона и т.д. Ввод новых научных программ в АНПА «REMUS-100» после его подъема на борт судна, а также обработка получаемой им информации осуществляется портативным компьютером.
Для обеспечения синоптических наблюдений на шельфе и области его разлома, а также на континентальном склоне, мобильные АНПА могут стать основными инструментами измерений поперечных и продольных «вихревых потоков» в условиях воздействия ветра и мезомасштабной изменчивости. С этой целью в одном из районов сети OOI под названием «Pioneer Array», расположенном недалеко от побережья Вудс-Холла на шельфе Атлантического океана, были использованы два АНПА «REMUS», которые работали на акватории площадью около 80 х 100 км и глубиной до 600 м. В этом районе происходит встреча океанических течений и обмен питательными веществами между побережьем и глубоким океаном, поэтому исследования здесь позволяют изучить экосистему шельфа, а также дают представление о проблемах загрязнений и газообмена на границе океан – атмосфера, включая углекислый газ. Существенное увеличение долговременности непрерывной работы этих аппаратов было обеспечено за счет установки в 2015 г. в центре этого района на глубине 450 м зарядной док-стации. Сама станция была соединена кабелем с буем на поверхности, служащим для её электроснабжения и передачи информации от АНПА на спутник и в обратном направлении.
С учетом опыта, полученного при эксплуатации док-станции для АНПА «Odyssey II», в WHOI был создан её модифицированный вариант для АНПА «REMUS-100» [9]. Для повышения эффективности стыковки с док-станцией на аппарат был установлен новый носовой модуль с акустическим датчиком самонаведения, инерциальной навигационной системой «Kearfott» (5) и цифровой навигационной акустической системой с ультракороткой базой (USBL), работающей на частотах 20–30 кГц (7), в результате чего его длина АНПА увеличилась до 174 см (рис. 2).

Рис. 2. АНПА REMUS 100, модифицированный для док-станции
Кроме того, носовая часть корпуса аппарата была оснащена блоком CTD (6) и розеткой для штырей передачи электроэнергии и данных между АНПА и док-станцией после стыковки. Навигационная система (3) с длинной базой (LBL) позволяет обнаружить транспондер (гидроакустический излучатель) док-станции на удалении более 3000 м и обеспечить движение к нему с высокой точностью. Дополнительную информацию обеспечивает гидролокатор бокового обзора (2). Траектория подхода АНПА к док-станции аналогична глиссаде самолета при посадке, при этом снижение аппарата начинается примерно в 100 м от неё. В дополнение к системе USBL для повышения точности подхода к док-станции АНПА «REMUS» оснащен (4) также акустическим доплеровским измерителем скорости течений (ADCP) и измерителем скорости движения (DVL), Диаметр ловушки док-станции, куда должен попасть аппарат и продвинуться внутрь цилиндрической части, имеет размер меньше метра (рис. 3). Поэтому в ближней зоне необходима высокая точность вычисления дальности (несколько сантиметров) и пеленга (около градуса). На поверхности корпуса аппарата установлены приемная антенна GPS / Iridium (1) и сетевая антенна беспроводной связи 2,4 МГц, позволяющие оператору дистанционно выполнять проверки, загружать в АНПА новые научные программы и получать с него данные и видео исследований. Это же можно сделать через поверхностный буй, который подключен к док-станции подводным кабелем.
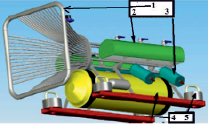
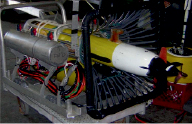
Рис. 3. Док-станция с входным соплом и баками плавучести
Док-станция оснащена решетчатой ловушкой (1) для свободного входа АНПА и балластной системой (2), обеспечивающей нейтральную плавучесть при постановке станции на дно с помощью телеуправляемого НПА или водолаза, а также её автоматический подъем на поверхность по акустическому сигналу (рис. 3).
Главной целью модификации зарядной станции было упрощение её конструкции и повышение надежности, путем использования для фиксации АНПА в доке и его контактного соединения только одного электропривода (3). Когда система управления АНПА распознает вход в док-станцию, движителями аппарата осуществляется его окончательная фиксация в цилиндрической части станции. Передача от док-станции электроэнергии и загрузка новой программы (миссии) работы на АНПА, а также от него данных исследования, осуществляется через стыковочное соединение, которое приводится в действие от электропривода специальным механизмом, установленным на раме станции, после того, как аппарат уже надежно зафиксирован в донной станции. Разъем состоит из двух направляющих штифтов док-станции, которые вводятся в ответные отверстия на корпусе аппарата, и электрического «мокрого» контактного соединения посередине, защищенного от морской воды полиуретановой присоской. Док-станция может обеспечиваться энергией от буя на поверхности или по кабелю подводной обсерватории, либо от собственных литий-ионных батарей, мощностью 11 кВт-ч и напряжением 23 В, что позволяет АНПА «REMUS» после зарядки работать непрерывно около 3 суток до следующей стыковки при скорости 5 узлов (2,5 м/с) или значительно дольше на более низких скоростях. Аккумуляторы с блоками электроники размещены в прочном корпусе герметичного контейнера (4), установленного на несущей раме док-станции (5).
Архитектура программного и электронного обеспечения док-станции совместима с установленным на АНПА «REMUS». Центральный компьютер станции через гостевой порт или через «Ethernet» подключается к информационной системе аппарата сразу же после выполнения электрического контактного соединения станции с аппаратом, обеспечивая общий интерфейс обеих систем. Модемы интерфейса дуплексной связи обеспечивают производительность 56 кБит/с на частотах 10–300 кГц. Программное обеспечение док-станции предназначено для осуществления мониторинга окружающей среды и телеметрии, а также управления приводом фиксации АНПА и подключения к нему электропитания и канала передачи данных. Станция может быть переведена в «спящий режим» в периоды между стыковками с АНПА для сохранения заряда бортовых батарей. Фактически, док-станция также может являться автономным подводным аппаратом и осуществлять собственные миссии, а также управляться тем же оператором, что и сам АНПА «REMUS». Натурные испытания док-станции с АНПА «REMUS-100» были проведены в 2005–2006 гг. недалеко от акватории Вудс-Хоула, а затем у побережья Флориды. Всего было совершено 29 попыток стыковки, из которых 17 прошли полностью успешно с подзарядкой батарей аппарата, передачей научных данных и загрузкой новой миссии. Целью дальнейших разработок долговременных док-станций являлось повышение как их собственной надежности, так и всего процесса автоматической стыковки с учетом различных проблем океанской среды (течения, биообрастание, коррозия и т.п.).
Технологии долговременных научных исследований института MBARI
Одновременно с WHOI, работы по подводной робототехнике начались в океанологическом институте MBARI, где были созданы АНПА «Bluefin», АНПА «Tethys» и зарядные док-станции к ним, рассчитанные на подключение к волновому энергетическому бую, либо к одной из модификаций концепции AOSN – кабельной обсерватории Monterey Advanced Research System (MARS) в заливе Монтерей [10]. Эта океанологическая обсерватория является первой на западном побережье США и состоит из восьми расположенных на глубине 891 м донных модулей (узлов), подключенных оптико-волоконным кабелем длиной 52 км к береговому Центру. Система MARS обеспечивает непрерывное электропитание и передачу данных для любых исследовательских приборов в открытом море, что позволяет океанологам разрабатывать и проводить разнообразные программы исследований. К каждому из восьми донных модулей с помощью телеуправляемых НПА можно подключать различное научное оборудование. В настоящее время в обсерватории MARS используется: гидроакустическая система наблюдения за поведением рыб «DEIMOS»; различные гидрофоны изучения океанской жизни; автономный донный ПТА «Benthic Rover» для изучения осадков; датчики температуры, проводимости и давления (CTD); автоматическая биологическая лаборатория; видеокамера «Eye in the Sea» высокой чувствительности; подводная лаборатория «FOCE» для изучения концентрации СО2 в морской воде; широкополосные сейсмометры; фотосистема наблюдения за бентосом «PhoBOS» и другое. Непрерывные измерения и наблюдения, выполняемые с помощью АНПА, движущихся по любым траекториям в расположении обсерватории MARS, могут обеспечить дополнительные возможности для различных научных исследований (рис. 4).
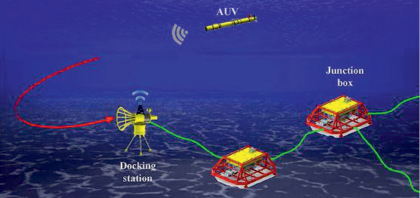
Рис. 4. Донная кабельная обсерватория MARS, где AUV – АНПА, Junction Box – стационарный соединительный модуль, Docking station – зарядная док-станция
С этой целью MBARI было запланировано использование АНПА «Dorado / Bluefin 21», диаметром 54 см, длиной 3,6 м и массой 640 кг (рис. 5, а). Бортовые литиевые полимерные аккумуляторы, мощностью 2 кВт-ч, обеспечивают дальность хода аппарата около 30 км при скорости движения 1,5 м/с [11]. Для навигации установлен доплеровский измеритель скорости (DVL), данные которого корректируются при всплытии на поверхность системой позиционирования (GPS), Поиск док-станции осуществлялся высокоточной гидроакустической навигационной системой с ультракороткой базой (USBL) модели Sonardyne, обеспечивающей поле зрения ± 85 градусов при частоте работы в 1,0 Гц. Основными требованиями при разработке док-станции для АНПА «Bluefin 21», так же как и для АНПА «REMUS», были максимальная простота и надежность, поэтому в станции использовалась только одна подвижная часть с электроприводом. Конструкция док-станции для проведений испытаний состояла из армированной нержавеющими кольцами диаметром в 2 м стеклопластиковой воронки входа АНПА, соединенной с цилиндром его фиксации, установленных на треугольной раме (рис. 5, б).

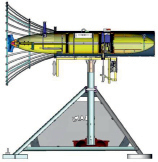
Рис. 5. АНПА «Блюфин» (а) и поперечное сечение зарядной док-станции (б)
Под приемным цилиндром были размещены акустический транспондер для самонаведения АНПА и прочный контейнер с электроникой управления процессами стыковки, передачи энергии и обмена данными. Электропитание на тестовый вариант док-станции подавалось по кабелю с одного из поверхностных буев научной сети Monterey Ocean Observing System (MOOS), оснащенного преобразователями волновой и солнечной энергии. Эти же кабель и буй служили для передачи информации между береговым Центром и АНПА через док-станцию. Алгоритм наведения, стыковки и расстыковки состоял из следующих шагов:
1. Навигационная система USBL аппарата на расстоянии до 2 км находит сигнал с док-станции и, учитывая показания гирокомпаса, рассчитывает траекторию движения АНПА в направлении к ней.
2. При приближении к станции около 200 м АНПА замедляет скорость движения до 1,0 м/с и, используя USBL, DVL и гирокомпас для коррекции дрейфа аппарата под действием течений, начинает выполнять режим плавной «посадки», заканчивающийся подходом аппарата к осевой линии конуса захвата дока.
3. Конус захвата обеспечивает выравнивание АНПА по всем осям и его вход полностью в цилиндр дока с диаметром только на несколько сантиметров больше диаметра аппарата, после чего по сигналу специального датчика срабатывает привод защелки док-станции и происходит окончательная фиксация аппарата.
4. В этом положении закрепленная на док-станции штанга оказывается введенной в приемное гнездо на АНПА, что обеспечивает индуктивную передачу электроэнергии через морскую воду со станции на батареи аппарата, без непосредственного контактного соединения. При этом эффективность передачи 1,0 кВт электроэнергии может достигать около 88 %.
5. Одновременно с подзарядкой АНПА, также через воду происходит передача полученных данных и новых миссий между аппаратом и док-станцией со скоростью 10 Мбит/с через беспроводную сеть Ethernet, антенны которой расположены в верхней части АНПА и на ловушке станции с разнесением 2,5 см.
6. После завершения зарядки система управления дока освобождает фиксацию АНПА и индуктивного соединения, что позволяет ему выйти на свободную воду для выполнения новой научной программы.
Долговременные автономные необитаемые подводные аппараты
Долговременность непрерывных научных исследований может быть значительно увеличена за счет повышения емкости батарей АНПА при уменьшении их размеров, а также минимизации всех собственных расходов энергии аппарата. Именно по такому пути пошли океанологи МБАРИ при создании АНПА «Tethys», что обеспечило его автономность свыше нескольких недель и положило начало использованию нового типа долговременных подводных аппаратов (ДАНПА), отнесенных за рубежом к классу LR AUV (Long Range AUV) [12]. При разработке АНПА «Tethys» было уделено большое внимание снижению поверхностного трения и выбору оптимальной гидродинамической формы его корпуса (рис. 6, а). Длина аппарата составляет 2,29 м, диаметр 30,5 см и водоизмещение 137 л.


Рис. 6. Два АНПА класса «Tethys» на палубе (а) и зарядная док-станция (б)
На корпусе аппарата размещены кормовые рули управления и антенна GPS/Iridium. Для навигации на аппарате установлены магнитный компас и измеритель скорости DVL, показания которого корректируются по данным GPS при запрограммированных всплытиях на поверхность, а также система USBL или LBL. Общая точность навигации составляет до 4 % от пройденного расстояния. В средней части аппарата размещен прочный контейнер объемом 65 л с системой изменения плавучести, батареями и другим оборудованием. Основная часть измерительных датчиков и научной аппаратуры размещена в разгруженных от гидростатического давления отсеках в носовой и кормовой частях АНПА. Кроме регулировки плавучести, имеется возможность изменения дифферента за счет перемещения аккумуляторных батарей. Такие решения позволяют АНПА «Tethys» работать как в обычном режиме подводного аппарата, так и в «спящем» режиме поплавка нейтральной плавучести или в режиме глайдера по пилообразной траектории. Поэтому оптимально спланированная программа научных исследований может обеспечить высокую автономность аппарата с минимальными затратами энергии. АНПА «Tethys» приводится в движение от бесщеточного электромотора постоянного тока, размешенного в прочном корпусе. Он подключен через магнитную муфту к валу гребного двигателя, находящегося вместе с подшипниками в «мокром» кормовом отсеке, что позволяет снизить трение и общие энергозатраты. Экономия энергии обеспечивается также установкой на АНПА измерительных датчиков с низким энергопотреблением и автоматическим управлением потребляемой мощностью каждого из них. Всё это позволило АНПА «Tethys», при выполнении первых научных исследований в открытом океане в 2012 г., отойти на 500 км от берега и совершить автономное плавание в течение 23 суток на 1800 км со средней скоростью 1,0 м/с. Такая высокая автономность аппарата дает возможность длительного его использования в удаленных районах, в том числе и подо льдом.
Разработанная в MBARI док-станция для АНПА «Tethys» (рис. 6, б) по своему принципу действия во многом аналогична станции для АНПА «Bluefin» [12]. Для наведения на неё также используется гидроакустический маяк и установленная на подводном аппарате навигационная система USBL, электроэнергия на док может подаваться с кабельной обсерватории типа MARS MBARI или по кабелю от буя на поверхности, как на полигоне MOOS MBARI [10]. Главное отличие док-станции для АНПА «Tethys» состоит в том, что при стыковке используется контактное соединение аппарата и дока. Прямое электрическое соединение док-станции с АНПА обеспечивает 100 % передачу электроэнергии, но требует защиты контактов от коррозии и биообрастания в морской воде, а также очень точной стыковки контактов, исключающей их повреждение при многократном использовании. Поэтому при разработке зарядных док-станций всё чаще используется бесконтактный индукционный способ передачи электроэнергии, хорошо зарекомендовавший себя для АНПА «Odyssey II» и АНПА «Bluefin». В этом случае снижаются требования к точности соединения для передачи, малое значение имеют обрастание и коррозия. Однако эффективность передачи энергии уменьшается почти на 15–20 %, а также повышаются масса и габариты оборудования, как на док-станции, так и на борту АНПА за счет сердечников трансформатора бесконтактной передачи энергии, инверторов, выпрямителей и регулятора зарядного устройства батарей АНПА. Новые технические решения позволяют снизить роль этих недостатков, однако главной проблемой реальной долговременности работы подводной робототехники остается обеспечение её абсолютной надежности. Максимально долговременные автономные океанологические исследования в Мировом океане может обеспечить только совместное использование аппаратов класса ДАНПА (LR AUV) и зарядных док-станций (рис. 7) с электроснабжением от поверхностных или подводных блоков с океанскими возобновляемыми источниками энергии в соответствии с концепцией АСОИ ЭО [3, 4].
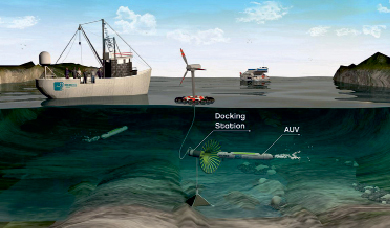
Рис. 7. Зарядная док-станция для АНПА с энергообеспечением от ВИЭ (Docking Station – док-станция, AUV – АНПА)
Примеры океанологических исследований с помощью АНПА повышенной автономности
А. Подводные аппараты класса ДАНПА (LR AUV).
Первые долговременные исследования с помощью АНПА «Tethys», оснащенных датчиками CTD, O2, измерения нитратов, турбулентности, хлорофилла и т.п., были выполнены в 2011–2012 гг. в заливе Монтерей-Бей [12, 13].
1. Для выявления последствий вредного цветения водорослей на экосистему и здоровье человека были проведены исследования динамики изменчивости фитопланктона. На каждом спуске и подъеме аппарата, перемещавшегося по пилообразной траектории, записывались показания уровня хлорофилла и определялись координаты его максимума (центра пятна цветения).
2. Для отслеживания с высоким разрешением координат фронта апвеллинга были выполнены многократные разрезы в его активной зоне, что важно для изучения влияния этого процесса на экологию океана.
3. При каждом спуске и подъеме движущегося по пилообразной траектории подводного аппарата выполнялось обнаружение и отслеживание термоклина, что необходимо для исследований в области циркуляции океана, морской экологии и подводной акустики.
К 2019 г. аппараты класса ДАНПА (LR AUV) океанологического института MBARI совершили более 150 долговременных научных экспедиций. Они продемонстрировали уникальные возможности проведения исследований в океане, особенно в биолого-экологическом направлении, за счет возможности аппарата находиться в «спящем» режиме с минимальными затратами энергии на питание датчиков (не более 5–6 вт) и полной его активизации лишь после обнаружения изучаемого объекта. Например, на озере Эри это позволило ДАНПА «Tethys» длительно выполнять поиск и изучение участков с большим количеством водорослей, а работающему с ним в паре ДАНПА «Makai», оснащенному экологическим пробоотборником, отправляться на эти участки и собирать пробы воды для анализов на токсичность [13]. Новые технологии LRAUV также значительно расширили круг научных программ всех других направлений исследований Мирового океана.
Б. АНПА совместно с зарядными док- станциями.
Специалисты института MBARI обобщили экспертные мнения двенадцати ведущих ученых США, работающих в областях океанской физики, биологии, химии, геологии и экологии [1]. В результате этого были выявлены 27 различных программ исследований, которые могут быть выполнены значительно более эффективно при помощи АНПА с автономными зарядными док-станциями, чем используя научные суда, поверхностные буи, буксируемые и телеуправляемые аппараты, дрифтеры или глайдеры. Также были определены 22 вида датчиков и приборов, которыми было необходимо оснастить такие АНПА. Главным критерием выбора всех разработанных программ являлась возможность долговременно получать в суровых условиях открытого океана непрерывные пространственно-временные данные более высокого качества и гораздо дешевле, чем с использованием АНПА с борта обеспечивающего судна. Выявленные научные миссии охватывают прибрежные зоны океана, глубоководные и арктические районы, тектонические зоны срединно-океанических хребтов. Одна часть программ направлена на непрерывный сбор в заданных точках или по заданному маршруту различных данных, таких как температура, соленость, глубина, скорость течений, содержание хлорофилла, биолюминесценция и т.д. К другой части миссий относится сбор биологических или геологических образцов, их исследования и архивизация на борту АНПА. Анализ выявленных программ исследований показал, что для выполнения многих из них требуется одинаковый набор датчиков и научной аппаратуры, что расширяет возможности АНПА для выполнения различных миссий. При этом может широко меняться необходимое пространственное и временное разрешение, а также требуемая дальность действия подводных аппаратов, достигающая сотен километров, и автономность развертывания зарядной док-станции в пределах от нескольких недель до двух-трех лет.
Одной из важных научных проблем, которые наиболее перспективно решать с помощью систем АНПА с док-станциями, является постоянное наблюдение в заданном районе океана до обнаружения эпизодически возникающего события или объекта, определяющего цель данной экспедиции. После того, как это произойдет, АНПА переключается на сбор данных и/или образцов с высоким пространственным и временным разрешением. К подобным долговременным миссиям относятся: мониторинг физических и биологических процессов на шельфе; пространственный мониторинг и сбор образцов для исследования вредоносного цветения водорослей; мониторинг и картирование микроэлементов в прибрежных водах; непрерывные наблюдения в активном сегменте срединно-океанского хребта; непрерывные гидрофизические наблюдения и реакция на события в каньонах; обнаружение гидротермального выхода с последующим мониторингом распространения его шлейфа и связанных с ним организмов; обнаружение и анализ in situ микробных организмов и т.д. В некоторых научных миссиях требуется последовательное использование нескольких АНПА и док-станций и, например, измерение с высоким разрешением временных и пространственных рядов CalCOFI (California Cooperative Oceanic Fisheries Research) на больших площадях Мирового океана (таблица).
Примеры океанологических исследований с помощью АНПА с док-станциями
|
Цель исследований (миссии АНПА) |
Научные задачи исследований |
Данные измерений АНПА с док-станциями |
|
Измерение временных и пространственных рядов CalCOFI с высоким разрешением для больших объемов толщи океана до 2500 кв. км, от дна 0–3000 м |
Как влияет динамика системы течения (CCS) на биологические и экологические процессы? Модель фитопланктон – азот – зоопланктон? |
CTD, ADCP, оптические датчики обратного рассеяния BBD/ OBS, спектрофотометр (ISUS), тепловизор, pH, флуорометр, O2, pCO2. |
|
Долгосрочные непрерывные наблюдения на активном участке срединного океанического хребта до 10 кв. км, от дна 50–500 м |
Как гидротермальные процессы влияют на биогеохимию, литосферу, экосистему океана и глобальный климат? |
Температура, соленость, скорость течения, растворенный кислород, питательные вещества, микроорганизмы и пробы воды |
|
Долгосрочное наблюдение за бентическими животными, картирование гидротерм и моллюсков в зонах до 100 кв. км, от дна 3–500 м |
Какие виды бентических животных присутствуют в глубинах океана, их поведенческие паттерны и сезонная изменчивость |
CTD, скорость течения, сульфид, метан, питательные вещества, растворенный кислород, наблюдения и цифровая съемка дна |
|
Окончание таблицы |
||
|
Цель исследований (миссии АНПА) |
Научные задачи исследований |
Данные измерений АНПА с док-станциями |
|
Мониторинг толщи вод с использованием лагранжевых и эйлеровых методов измерений в покрытых льдом регионах Арктики и Антарктики, во всей толще воды диаметром до 5 км |
Какие зоопланктоны присутствуют, их численность, миграция, распределение, модели поведения и питания, влияние на экосистему |
CTD, скорость течения, растворенный O2, толщина льда, распределение частиц, химические элементы, численность и распределение животных, цветная съемка |
Ряды океанологических и промысловых данных CalCOFI позволяют ученым оценить влияние человека и последствий изменения климата на экосистемы прибрежных районов океана. Для ряда научных программ, связанных с обнаружением биологических объектов и последующим длительным наблюдением за ними, например конкретными морскими животными или рыбами, требуется одновременно использование нескольких АНПА с одной зарядной док-станцией. Выполненный учеными MBARI анализ показал целесообразность длительного присутствия в океане АНПА с док-станциями, как для быстрого реагирования на исследуемый объект и получения о нем высококачественных научных данных, так и для значительного снижения для этого экспедиционных затрат из-за отсутствия судов – носителей аппаратов.
Из рассмотренных научных программ следует особо выделить долговременные исследования глубоководных участков гидротермальных зон, а также районов Арктики и Антарктики, которые наиболее трудно, дорого или невозможно выполнять традиционными способами (таблица). Целесообразно выполнение миссий, направленных на обнаружение с помощью АНПА эпицентров подводных землетрясений, с последующим сбором образцов в зоне извержения и их лабораторными исследованиями in situ по микробиологии и геохимии. При этом непрерывные долговременные наблюдения должны проводиться на площади 10х20 км в толще воды до 50–200 м от дна, а после обнаружения места извержения в течение месяца на площади 20х60 км и по вертикали от дна до 1000 м. Целью миссий АНПА с зарядными док-станциями может быть также выявление гидротермальных выходов с последующим годичным мониторингом химико-биологических процессов в их факелах. Такие исследования очень важны для решения одного из главных вопросов – не приведет ли добыча сульфидных руд к нарушениям подводной экосистемы. Опыт MBARI (таблица) показал также эффективность использования АНПА с док-станциями в полярных районах, которые являются наименее исследованными океанологами и могут быть недоступны для судов и где проведение работ с ледяного покрова чрезвычайно сложно, особенно в полярные зимы. Подобные исследования, выполняемые несколько раз в неделю в течение года, помогут установить, например, разновидности зоопланктона, их численность, распределение и сезонную изменчивость, а также модели поведения и влияние на экосистему Арктики или Антарктики. Одна из программ исследований в Арктике, разработанная океанологами MBARI, названа «Robo-Fram» [1] в честь норвежского полярного научного судна «Fram», которое с 1893 по 1912 г. три раза специально дрейфовало в арктических льдах, общей сложностью почти 4 года. Технологии подводной робототехники позволяют модернизировать эту идею для долговременных исследований, используя АНПА с подвешенной подо льдом зарядной станцией (рис. 8).
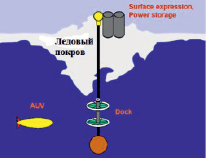
Рис. 8. Концепция Robo-Fram зарядной станции с АНПА для долговременных исследований в Арктике и Антарктике ( AUV – АНПА, Dock – док-станция, Power storage – накопитель энергии) (MBARI)
Летом 2010 г. сотрудники WHOI с помощью АНПА «REMUS» провели подледные исследования переноса воды из Берингова пролива в Арктику через Чукотское море, где её свойства меняются в результате охлаждения и образования льда [14]. Приток тихоокеанской воды является важным источником пресной воды, СО2 и питательных веществ в Северный Ледовитый океан. Поэтому изучение этого процесса представляет большой интерес с точки зрения изменения климата и отступления арктического льда, для чего на АНПА «REMUS» были установлены датчики CTD, измеритель течений ADCP, оптический измеритель хлорофилла и растворенного органического вещества ECO. С целью увеличения долговременности использования АНПА была использована выполненная из полиэтиленовой сети док-станция, которую опускали под воду через прорубь. Навигационная система USBL подводного аппарата обеспечивала его движение к док-станции по сигналу акустического маяка, размещенного в центре сети. Стыковка осуществлялась с помощью крюка в носовой части АНПА, после чего сеть с аппаратом поднималась через прорубь на поверхность для обслуживания. Было выполнено четыре автономных миссии АНПА «REMUS», каждая из которых заканчивалась успешной стыковкой. Всего подо льдом, с использованием систем навигации USBL и LBL, было пройдено 14 км и получены важные результаты океанологических исследований арктического шельфа. Дальнейшее развитие технологий систем АНПА с док-станциями обеспечит оптимальные возможности для эффективного выполнения подо льдом полярных районов различных научных программ.
Заключение
В соответствии с концепцией АСОИ ЭО Института океанологии им. П.П. Ширшова использование подводных беспилотников повышенной автономности обеспечивает огромные перспективы для проведения непрерывных наблюдений и исследований в Мировом океане [2–4]. Это очень важно в сложившейся обстановке, когда отечественный научный флот из-за недостатка средств на экспедиции гораздо больше времени находится у причала, чем в океанских экспедициях. К тому же этот флот состоит на 80 % из старых судов, которые в ближайшие годы будут выведены из эксплуатации [3, 4]. А тем, которые останутся, могут ограничить выход в море без дорогостоящей модернизации силовых установок из-за экологических требований к выбросам от сжигания мазута, вводимых Международной морской организацией при ООН. Следует отметить также, что без проведения постоянных исследований в выделенных для России районах с глубоководными залежами полезных ископаемых Международный орган по морскому дну может лишить нашу страну доступа к их разработке. Использование научных судов для подобных работ обходится более чем в 5 млн руб. в сутки, что в настоящее время является неподъемной задачей для отечественной науки [3]. Реализация концепции АСОИ ЭО (Цифровой океан) для выполнения научных исследований позволит решить перечисленные проблемы и полностью соответствует приоритетному направлению развития России – цифровизации её экономики. Разработка и внедрение новых научных программ и технических средств АСОИ ЭО, в первую очередь различных АНПА с зарядными док-станциями, позволит обеспечить отечественным океанологам долгожданный «выход в море» и долговременное непрерывное присутствие в Мировом океане для получения, передачи и накопления информации высокого качества при снижении экспедиционных расходов на сотни миллионов рублей. Как следствие, могут быть получены новые результаты и открытия по всем научным направлениям, разработаны более точные модели различных процессов в океане и климатических прогнозов, что позволит предотвратить или сократить ущерб от техногенных и природных катастроф, сохранить здоровье и жизни людей и избежать ущерба на многие миллиарды рублей.
Работа выполнена в рамках государственного задания ИО РАН (тема № 0149-2020-0012).
Библиографическая ссылка
Горлов А.А. ДОЛГОВРЕМЕННЫЕ ОКЕАНОЛОГИЧЕСКИЕ ИССЛЕДОВАНИЯ С ПОМОЩЬЮ АВТОНОМНЫХ ПОДВОДНЫХ НЕОБИТАЕМЫХ АППАРАТОВ // Научное обозрение. Технические науки. 2020. № 4. С. 81-94;URL: https://science-engineering.ru/ru/article/view?id=1308 (дата обращения: 02.08.2026).
DOI: https://doi.org/10.17513/srts.1308