

 science-review.ru
science-review.ru
Чтобы получить достоверный опыт дополненной реальности, визуализированный дополненный объект должен быть правильно наложен на изображение камеры. Для достижения регистрации изображения используется процесс, называемый отслеживанием [1]. Отслеживание может быть достигнуто несколькими способами, отличающимися входными данными, используемыми для этого.
В данной статье будут приведены различные методы отслеживания, а также методы рендеринга объектов, полученных в результате отслеживания с использованием смартфона.
Материалы и методы исследования
Идеальный алгоритм отслеживания должен поддерживать наложение дополненного объекта таким образом, чтобы объект не был распознан как дополненный. Визуализируемое изображение должно отображаться точно в нужном месте, даже когда наблюдатель ходит вокруг, чтобы увидеть его под разными углами. Подходы к отслеживанию можно разделить на две группы, в зависимости от использования входного изображения с реальной сцены. Невизуальное отслеживание способно работать без обработки изображения реального мира, в то время как визуальное отслеживание зависит от распознавания паттернов во входном изображении, чтобы перекрыть дополненный объект.
Отслеживание
Невизуальное отслеживание. Отслеживание без визуального ввода должно использовать другие данные для реализации регистрации изображения. Реальный мир, камера и дополненный объект должны быть проецированы в одну общую систему координат. Знание местоположения и поворота камеры имеет важное значение для определения угла обзора дополненного объекта. Также важно желаемое положение дополненного объекта. Расположение камеры смартфона измеряется многими датчиками. Получить местоположение можно по сети GSM, Wi-Fi или по глобальным системам позиционирования, предоставляемым спутниками из космоса. Последний упомянутый метод является наиболее точным. Настройка местоположения дополненного объекта с невизуальным отслеживанием осуществляется путем установки желаемого местоположения объекта по геологическим координатам реального мира. Таким образом, одна общая система координат для регистрации изображений – это геологические долгота, высота и широта.
Когда задано желаемое положение объекта, необходимо измерить местоположение и поворот камеры (в данном случае камеры мобильного устройства). Для измерения местоположения прибора используются встроенные геолокационные чипы, обычно GPS, ГЛОНАСС и GALILEO [2]. Все эти локационно-измерительные системы работают по одному и тому же принципу. Спутники в космосе, вращающиеся вокруг Земли, передают сигналы с временной информацией, позволяя антенне целевого устройства принимать этот сигнал и вычислять расстояние от спутника. Для фиксации точного расположения в трехмерном пространстве необходим сигнал по меньшей мере от трех спутников. Точность определения местоположения увеличивается с увеличением количества спутников, пример показан на рис. 1.

Рис. 1. Определение местоположения с помощью четырех спутников
Из-за расстояния, которое проходит сигнал, точность этого метода обычно составляет менее 3 м. С ухудшением погодных условий или определением в районах с узкой видимостью неба точность становится намного хуже. Однако одновременное использование нескольких навигационных систем для определения местоположения одного предмета улучшает точность. Смартфоны также оснащены антеннами A-GPS (Assisted GPS), когда подключение к интернету используется для загрузки последних сообщений о местоположении спутников, чтобы получить более точные результаты и более быструю блокировку местоположения.
Когда местоположение устройства определено, необходимо измерить наклон камеры, чтобы правильно сделать регистрацию изображения. Для этого используются три датчика: акселерометр, гироскоп и цифровой компас. Микросхема акселерометра измеряет ускорение устройства по трем осям, предоставляя информацию о незначительных перемещениях устройства. Гироскоп вычисляет наклон прибора, также по трем осям, а цифровой компас определяет относительное вращение прибора от северного магнитного полюса Земли.
Визуальное отслеживание. Визуальные методы отслеживания не используют информацию из других источников. Единственным вводом данных, необходимым для достижения регистрации изображения, является само изображение камеры. Алгоритмы такого типа слежения должны реализовывать распознавание изображений. Для этого используются маркеры [3–4]. Маркеры – это паттерны, обычно объекты, размещенные в реальной сцене, которые используются для определения положения дополненного объекта. Наиболее распространенным случаем является использование QR-кодов, так как они легко распознаются на изображении. Для более точного размещения также возможно использование 3D-маркеров (рис. 2).

Рис. 2. Визуальное отслеживание с помощью маркера
Визуальное отслеживание без маркеров. Безмаркерный визуальный трекинг – это сочетание визуального и невизуального трекинга, когда входное изображение используется без маркеров, а также данные с датчиков устройства для достижения регистрации изображения. В этом случае вращение камеры смартфона используется как имитация стереоскопического зрения для получения карты глубины сцены, позволяющей распознавать 3D-объекты на реальной сцене [5].
Рендеринг изображения
Рендеринг – это процесс преобразования 3D-моделей и сцен, сохраненных в компьютере, в 2D-изображение, которое впоследствии отображается на устройстве отображения, обычно мониторе [6]. Рендеринг – это наиболее сложный и требовательный к производительности сегмент компьютерной графики, используемый во многих областях (медицина, архитектура, машиностроение, видеомонтаж и др.). Каждая из этих дисциплин требует от визуализируемого изображения различных параметров (качество изображения, скорость рендеринга), что приводит к появлению многих методов рендеринга. Рендеринг в реальном времени – это рендеринг, который способен взаимодействовать с пользователем таким образом, что пользователь не распознает отдельные изображения, доставленные ему в руки с минимальной задержкой. Это требует быстрого прохождения через конвейер рендеринга, что является очень трудоемкой задачей, превышающей возможности производительности процессора. Эта потребность была удовлетворена с помощью специального аппаратного блока, используемого для геометрических вычислений, графического процессора (GPU).
Конвейер рендеринга. Концепция конвейера используется во многих различных формах, где процесс делится на отдельные этапы, чтобы предотвратить запаздывание всей системы [6]. Конвейер рендеринга, также называемый графическим конвейером или графическим конвейером рендеринга, разделен на три концептуальных этапа для увеличения скорости всего рендеринга (рис. 3):
- Приложение.
- Геометрия.
- Растеризация.

Рис. 3. Стадии конвейера рендеринга
Каждая стадия может быть разделена на несколько стадий, что означает, что каждая стадия также является конвейером. Некоторые части конвейера могут быть распараллелены, чтобы соответствовать высоким требованиям к производительности. Скорость конвейера рендеринга измеряется в fps (кадрах в секунду) и определяется самым медленным этапом. Эта скорость обычно изменяется в зависимости от сложности вычисляемой сцены, которая меняется кадр за кадром, поскольку пользователь взаимодействует с приложением. Этап применения конвейера управляется программным обеспечением центрального процессора, позволяющим осуществлять параллельную обработку благодаря множеству потоков центрального процессора. На этом этапе выполняются различные задачи: обнаружение столкновений, алгоритмы глобального ускорения, анимация, моделирование физики (необязательно) и многие другие, в зависимости от типа приложения. Этап геометрии вычисляет преобразования, проекции и т.д. Определение того, что, как и где должно быть нарисовано, выполняется, как правило, на графическом процессоре (GPU). Последний этап, этап растеризации, полностью обрабатывается на графическом процессоре, визуализируя данные, выводимые с предыдущего этапа, а также любые необходимые вычисления на пиксель. Использование специализированного оборудования для вычислительной графики необходимо для достижения плавного рендеринга в реальном времени без задержек, что является фундаментальным также для приложений дополненной реальности. К счастью, все современные смартфоны и планшеты оснащены мощными графическими процессорами, что позволяет использовать дополненную реальность на мобильных устройствах.
Фотореалистичный рендеринг. Для достижения правдоподобного опыта дополненной реальности дополненный объект должен быть представлен в наилучшем доступном качестве и реалистичности. Для этого используются фотореалистичные методы рендеринга. Фотореалистичный рендеринг, также называемый непредвзятым рендерингом, – это метод, который физически точно визуализирует сцену, обычно отслеживая свет с помощью алгоритмов на пиксель. Непредвзятые методы рендеринга включают в себя:
- Трассировка пути.
- Трассировка света.
- Двунаправленная трассировка пути.
Результаты исследования и их обсуждение
Одним из наиболее широко используемых методов фотореалистичного рендеринга является трассировка лучей. Трассировка лучей – это алгоритм для каждого пикселя, который использует метод трассировки пути, отбрасывая лучи от камеры в пространство, чтобы определить цвет пикселя. Он также используется в Z-буферных реализациях визуализаторов для достижения обнаружения столкновений объектов и щелчка мыши по их выбору. Щелчок мыши привязывается к одному пикселю, из которого луч отбрасывается в пространство, выбирая первый попавшийся объект. При рендеринге трассировка лучей проста в вычислении теней и отражений. Алгоритм трассировки BasicRay представлен на рис. 4.

Рис. 4. Алгоритм трассировки BasicRay
В этом примере цвет пикселя вычисляется только в соответствии с материалом и применением нетрассирующей световой модели (т.е. модели Phong [7]) к пикселю поверхности объекта. В результате качество изображения сравнимо с предвзятыми визуализаторами. Полный механизм трассировки лучей вычисляет освещение сцены лучами. После того как луч попадает на объект, он отражает и отслеживает луч итеративно, пока луч не попадает на источник света. Тот же принцип используется и для вычисления теней. Когда луч, идущий из точки на поверхности объекта, попадает на другой объект по пути к источнику света, вычисленная точка оказывается в тени. Эта техника физически точна, потому что она описывает и вычисляет поведение света в реальных сценах. Результирующие изображения находятся в особых условиях, их трудно отличить от фотографий. Nvidia Iray – это фотореалистичный движок рендеринга, который генерирует фотореалистичные изображения, имитируя физическое поведение света и материалов (рис. 5) [8].
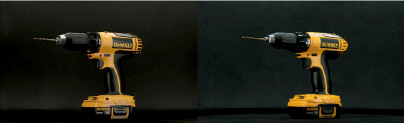
Рис. 5. Слева модель, справа её визуализация с помощью Nvidia Iray
Требования к производительности. Движок рендеринга Nvidia Iray, упомянутый выше, способен работать только на настольных компьютерах с мощной видеокартой, да и то не в режиме реального времени. Трассировка лучей – это алгоритм для каждого пикселя, поэтому его вычислительные требования быстро возрастают с более высокими разрешениями. На мобильных устройствах до сих пор не удается добиться такого качества рендеринга изображения. Рендеринг в реальном времени также необходим для применения дополненной реальности, а также как резерв вычислительной мощности для обработки изображения камеры и датчиков устройства. До сих пор нет никаких шансов для обычных устройств выполнять рендеринг фотореалистичных сцен в реальном времени, направленных на создание стилизованной реальности, но их производительность сходится, чтобы удовлетворить этим требованиям.
Vulkan API. Аппаратное обеспечение – это не единственная область, которая переживает значительный прогресс. Наряду с аппаратным обеспечением, программные API и драйверы графических процессоров также претерпели значительные улучшения. Одним из самых важных изменений является Vulkan API. Vulkan – это низкоуровневый API для графического и вычислительного оборудования. Это набор команд, которые позволяют определять спецификацию шейдеров, ядер и используемых ими данных [9]. С другой точки зрения, Vulkan – это конвейер рендеринга, который имеет некоторые программируемые этапы и некоторые управляемые состоянием этапы фиксированной функции, которые вызываются конкретными операциями рисования. Эти настройки позволяют намного больше контролировать графическое вычислительное оборудование, позволяя им писать более оптимизированный код. Использование API Vulkan уменьшает количество вызовов рисования, отправляемых на центральный процессор, что приводит к значительному снижению накладных расходов центрального процессора. Это решение обеспечивает повышение производительности на всех существующих платформах, даже на мобильных устройствах. Также поддерживаются устройства Android, но только с аппаратной поддержкой OpenGL ES 3.1 и более поздних версий. Vulkan API все еще относительно новый, поэтому реализовано всего несколько приложений, а на мобильных устройствах ситуация еще хуже. Однако бенчмарковые тесты показывают огромный потенциал этого API, и в ближайшем будущем мы определенно увидим гораздо больше приложений, использующих этот API. Основываясь на последних бенчмарках, повышение производительности API Vulkan может достигать более 80 % по сравнению с решениями OpenGL [10].
Заключение
Существуют различные методы отслеживания, и каждый метод применяется под свои конкретные задачи. Для задач с геопозиционированием хорошо подходит метод, основанный на невизуальном отслеживании, для задач с выводом информации об объекте хорошо подойдет метод, основанный на визуальном отслеживании. Рендеринга объектов, полученных в результате отслеживания с фотореалистичными изображениями, пока что не удаётся достичь с текущими технологиями, но Vulkan API даёт надежды, что в скором времени этого будет возможно.
Библиографическая ссылка
Маслов А.С., Козина А.В., Белов Ю.С. ОТСЛЕЖИВАНИЕ И РЕНДЕРИНГ ИЗОБРАЖЕНИЙ В КОНТЕКСТЕ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ С ИСПОЛЬЗОВАНИЕМ СМАРТФОНА // Научное обозрение. Технические науки. 2020. № 6. С. 31-36;URL: https://science-engineering.ru/ru/article/view?id=1323 (дата обращения: 02.08.2026).