

 science-review.ru
science-review.ru
В предыдущей статье [1] на основе материалов исследования различных подходов и методов обработки изображений, содержащих объекты заданного класса [2] была спроектирована модель нейронной сети для распознавания дорожных знаков. Эта модель представляет собой общий иерархический экстрактор признаков, который преобразует обработанные интенсивности пикселя входного изображения в вектор признаков, который классифицируется двумя полносвязными слоями. В данной статье рассматривается процедура обучения модели на наборе данных, сгенерированном на основе российской базы автодорожных знаков RTSD [3].
Цель исследования: рассмотреть процесс обучения сверточной нейронной сети, сформировать обучающий набор данных и усовершенствовать модель распознавания дорожных знаков, а также проанализировать полученную модель и зафиксировать результаты работы.
Формирование набора данных. Для проведения эксперимента использовался набор данных, сгенерированный на основе российской базы автодорожных знаков RTSD. Для составления базы RTSD использовались кадры, предоставленные компанией Геоцентр-Консалтинг [3]. Кадры получены с широкоформатных видеорегистраторов, установленных за лобовым стеклом автомобиля. Видеорегистраторы снимают со скоростью 5 кадров в секунду. Разрешение кадров варьируется от 1280×720 до 1920×1080. Также стоит отметить, что кадры сняты в различные времена суток (утро, день, вечер), времена года (зима, весна, лето, осень), а также при различных погодных условиях (яркое солнце, дождь, снег). База RTSD содержит 156 различных знаков и 104358 изображений дорожных знаков.
Набор данных для обучения предлагаемой модели состоит из 42689 изображений с 53 различными классами. Изображения распределены между этими классами неравномерно, поэтому модель может предсказывать некоторые классы с более высокой точностью, чем другие. Поэтому целесообразно сделать набор данных для обучения более согласованным, увеличив выборку данных путем модификации существующих изображений. Такой метод называется аугментацией данных.
Одно из ограничений модели сверточной нейронной сети состоит в том, что она не может быть обучена на изображениях разного размера. Таким образом, в наборе данных обязательно должны быть изображения одного и того же размера.
В исходном наборе данных RTSD-3 изображения имеют динамический диапазон измерений, варьирующийся от 16×16×3 до 128×128×3, следовательно, он не может быть передан непосредственно в модель. С помощью библиотеки OpenCV методом cv2.resize(img, (40, 40)) была установлена размерность (40×40) всех изображений в наборе данных (рис. 1).

Рис. 1. Набор изображений 40×40 для каждого из 53 классов
Обучение сверточной нейронной сети. Имеющийся набор данных предварительно обрабатывается перед началом обучения, а затем, во время обучения, случайным образом искажается перед началом каждой следующей эпохи. Стоит заметить, что предварительная обработка не является стохастической и выполняется для всего набора данных до начала обучения. Однако искажения являются стохастическими и применяются к каждому предварительно обработанному изображению во время обучения, используя случайные, но ограниченные значения трансляции, поворота и масштабирования. Эти значения взяты из равномерного распределения в заданном диапазоне, т.е. ±10 % от размера изображения для сдвига (параметры width_shift_range и height_shift_range), 0,8–1,2 – для масштабирования (параметр zoom_range) и ±10 градусов – для вращения (параметры rotation_range и shere_range). Алгоритм учитывает только те классы, в которых менее чем 1000 изображений, и выполняет одну из операций преобразования. Полученные изображения добавляются в один и тот же класс до тех пор, пока число его элементов не достигнет 1000 единиц [4]. Процедура обучения сверточной нейронной сети показана на рис. 2.
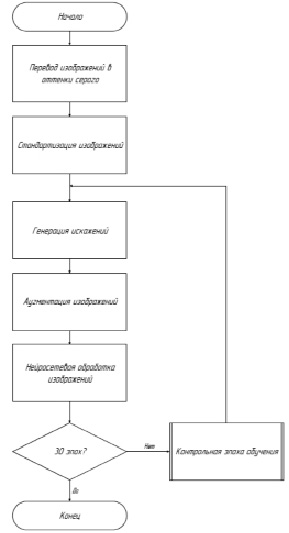
Рис. 2. Обучение сверточной нейронной сети
Аугментация. Переобучение происходит в основном, когда набор обучающих данных слишком мал. Один из способов, позволяющий исправить эту проблему, заключается в расширении набора данных (так называемое увеличение) до необходимого количества обучающих примеров. Улучшение данных – это процесс применения произвольных преобразований к исходным данным и добавления полученных измененных данных в исходный обучающий набор. Цель состоит в том, чтобы сгенерировать реалистичные изображения, которые модель никогда не увидит в последующем: ни в наборе данных для валидации, ни в тестовом.
В tf.keras расширение данных осуществляется с помощью класса ImageDataGenerator. Достаточно передать конструктору класса набор различных значений для необходимых параметров:
- width_shift_range = 0,1 – задает случайный сдвиг по ширине (доля от ширины изображения, если < 1, или количество пикселей, если >= 1);
- height_shift_range = 0,1 – задает случайный сдвиг по высоте (доля от высоты изображения, если < 1 или количество пикселей, если >= 1);
- zoom_range = 0,2 – Float или [lower, upper]. Диапазон случайного выбора масштабирования изображения (если float, то [lower, upper] = [1-zoom_range, 1+zoom_range]);
- shear_range = 0,1 – Float, задает диапазон сдвига пикселей изображения (угол сдвига в градусах в направлении против часовой стрелки).
Окончательное изображение фиксированного размера получается с использованием билинейной интерполяции искаженного входного изображения (рис. 3) [5]. Эти искажения позволяют обучать нейронную сеть без переобучения и значительно улучшить производительность обобщения результатов (то есть, как показывает практика, частота ошибок на первом этапе обучения уменьшается с 3,98 до 0,71).

Рис. 3. Фрагмент искусственно созданного набора изображений
Параметры при обучении сети. Обучение нейронной сети осуществляется с помощью метода fit, основными аргументами которого являются [6]:
- X_train – массив обучающих данных (модель имеет один входной слой).
- Y_train – массив меток (модель имеет один выходной слой).
- Batch_size (размер пакета обучения) – градиент усредняется по примерам, имеющимся в обучающем пакете, после чего пересчитываются веса нейронной сети с использованием этого усредненного значения. В определенном смысле градиент аппроксимируется по всему тренировочному набору (batch_size = 50).
- Steps_per_epoch – количество шагов (часть данных), после выполнения которых эпоха обучения считается завершенной (Steps_per_epoch = 2000).
- Epochs – число итераций (эпох) применения всех заданных параметрами x и y данных.
- Validation_data – кортеж (x_validation, y_validation), который используется для оценки потерь по завершению каждой эпохи обучения.
- Shuffle – параметр типа Boolean, равный 1 – флаг перетасовки обучающих данных перед началом каждой эпохи обучения.
Для обучения и оценки модели исходный набор данных, состоящий из 42689 изображений, был разделен на обучающий (Train) и тестовый (Test) наборы данных в соотношении 80:20 соответственно. Обучающий набор, в свою очередь, включает в себя проверочный набор данных (Validation), состоящий из 6831 изображения. Таким образом, исходный набор данных подразделяется на: обучающий набор (Trainig) – 27320 изображений; проверочный набор (Validation) – 6831 изображение; тестовый набор (Test) – 8538 изображений.
На этапе обучения сеть обрабатывает пакет из 2000 изображений из набора данных train за одну итерацию (эпоху). После успешного обучения точность вычисляется с использованием всех изображений из тестового набора данных. На рис. 4 показано, что точность классификации растет с увеличением числа обучающих итераций. График показывает, что, начиная со второй итерации, сеть достигает точности классификации выше 0,9.
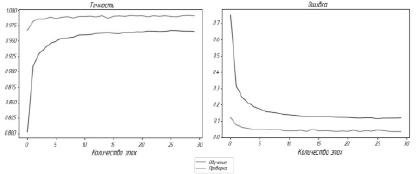
Рис. 4. Показатели точности и потерь на протяжении 30 эпох обучения
Результаты обучения. Для реализации и обучения модели использовались библиотеки глубокого обучения TensorFlow и Keras совместно с библиотеками Cuda и Cudnn для ускоренного обучения сети на GPU. Модель обучалась с использованием системы на базе процессора AMD Ryzen 5 2600 Six-Core Processor 3.4 GHz, 16 GB оперативной памяти класса DDR4 3200 MHz и графического процессора NVIDIA GeForce GTX 1660 6GB GDDR5 с частотой ядра/памяти: 1830/8000 MHz соответственно. Обучение модели на GPU заняло 15,5 мин, а время обучения на CPU составило 4,2 ч.
В результате обучения нейронной сети на протяжении 30 эпох были получены следующие данные: точность на обучающих данных – 0,9623; потери (ошибка) на обучающих данных – 0,1304; точность на проверочных данных – 0,9918; потери (ошибка) на проверочных данных – 0,0319. Для наглядности с помощью библиотеки Matplotlib были построены графики точности и потерь (рис. 4).
Реализация модели достигает точности 99,22 %, что превышает результат из исследования [7] Rinu Gour, где сверточная нейронная сеть, обученная на базе дорожных знаков Германии GTSRB, достигает точности 95 %. Модель сверточной сети в исследовании Rinu Gour, построенная для распознавания 43 классов дорожных знаков Германии, состоит из сверточных слоев и слоев подвыборки. На каждом слое из изображения извлекаются признаки (цвет, форма и др.), которые помогают классифицировать изображение. Также в модели предусмотрен слой отсева, который используется для предотвращения переобучения нейронной сети. В результате 15 эпох обучения были получены высокие показатели точности на обучающих и проверочных данных: 0,948 и 0,98 соответственно.
Заключение
В результате обучения нейронной сети, которое длилось на протяжении 30 эпох, была достигнута точность предсказания в 99,22 %, что превышает результат из исследования Rinu Gour, где нейронная сеть достигает точности 95 %. Следовательно, можно сделать вывод о том, что использования простой модели глубокой классификации недостаточно для повышения точности предсказания. Перед обучением очень важны всевозможные виды предварительной обработки изображений. В предлагаемой модели используется предварительная обработка размытых и зашумленных изображений, а также аугментация данных, что, в свою очередь, позволяет улучшить точность предсказания.
Библиографическая ссылка
Смольянинов В.А., Гришунов С.С., Белов Ю.С. НЕЙРОСЕТЕВАЯ МОДЕЛЬ ДЛЯ РАСПОЗНАВАНИЯ ДОРОЖНЫХ ЗНАКОВ // Научное обозрение. Технические науки. 2021. № 3. С. 50-54;URL: https://science-engineering.ru/ru/article/view?id=1357 (дата обращения: 26.07.2026).