

 science-review.ru
science-review.ru
Обнаружение дорожных знаков чрезвычайно важно в системах автономного вождения и безопасности на транспорте. Однако точное распознавание дорожных знаков остается сложной задачей, особенно в экстремальных условиях. В суровых погодных условиях, таких как туман и снег, дорожно-транспортные происшествия часто происходят из-за рассеянного вождения, невнимательности или плохой видимости. Для снижения риска несчастных случаев и улучшения опыта вождения водителей были разработаны системы распознавания дорожных знаков, которые сыграли важную роль в автоматическом вождении и обслуживании дорожной сети. Системы распознавания дорожных знаков можно разделить на две подзадачи, т.е. обнаружение и классификацию, первая из которых направлена на идентификацию целевых объектов по изображениям, а вторая направлена на классификацию обнаруженных дорожных знаков по подклассам [1].
Цель исследования – разработать систему распознавания дорожных знаков, основанную на сверточной нейронной сети, для повышения точности обнаружения и распознавания дорожных знаков.
Описание модели. Предлагается новая модель, основанная на сверточной нейронной сети, для повышения точности обнаружения и распознавания дорожных знаков, особенно в условиях плохой видимости и крайне ограниченного зрения. Общая модель системы распознавания дорожных знаков состоит из ряда взаимосвязанных модулей.
Рис. 1. Общая архитектура предлагаемого подхода
Для повышения эффективности вычислений был предложен одноступенчатый детектор. Одноступенчатый детектор не имеет этапа регионального предложения; вместо этого он предсказывает класс и местоположение объекта и получает конечный результат с помощью одного этапа. Наиболее представительными моделями являются YOLO и SSD. Одноступенчатая модель распознавания дорожных знаков обладает высокой эффективностью, но недостаточной точностью [2].
Общая архитектура модели. Общая архитектура показана на рис. 1. Система состоит из основной сети, вспомогательной сети и детектора. Для того чтобы определить местоположение и класс объекта, необходимо извлечь объекты из изображения и захватить объекты с использованием основной сети для позиционирования и классификации. Была использована смешанная свертка, которая могла выполнять сверточную операцию со смешанными размерами ядра, так что можно было захватывать различные шаблоны с различными разрешениями. С начальными выходными функциями основной сети вспомогательная сеть объединяет функции и адаптирует размер, тем самым улучшая общую производительность архитектуры. Модуль слияния функций внимания (AFF – attentional feature fusion) использовался во вспомогательном слое для объединения функций, полученных из одного и того же слоя или перекрестного слоя, на основе внимания, включая короткие и длинные соединения с пропуском, и даже выполнял начальное слияние внутри себя. Детектор получает три выходных сигнала от сети и выдает прогноз положения ограничивающей рамки, достоверности объекта и классов объектов для каждого выходного слоя карты объектов. С помощью высококачественных карт объектов каждого слоя обнаружение может быть более точным [3].
Основная сеть для извлечения объектов из изображения. Рассмотрим основную сеть. Основная сеть состояла из модуля фокусировки, свертки с пакетной нормализацией и LeakyReLU (CBL – Convolution with Batch normalization and LeakyRelu), смешанной свертки (MixConv – mix convolution), многоступенчатой частичной сети (CSP – Cross Stage Partial Network) и пуллинга пространственных пирамид (SPP – Spatial Pyramid Pooling). Размер входного изображения составлял 512 × 512 × 3, среди которых 512 × 512 представляли ширину и высоту в пикселях соответственно, а 3 представляли 3 канала. После модуля фокусировки размер был изменен на 256 × 256 × 64. После следующего модуля свертки с пакетной нормализацией и LeakyReLU (CBL – Convolution with Batch normalization and LeakyRelu) размер стал 128 × 128 × 128.
Модуль фокусировки. Модуль фокусировки изображен на рис. 2.
Модуль фокусировки взял входное изображение размером 512 × 512 × 3 и выполнил операцию нарезки. Эта операция извлекла каждый второй пиксель из изображения аналогично понижающей дискретизации. Затем из входного изображения были получены 4 изображения, 4 изображения дополняли друг друга, и, таким образом, отсутствовали данные.
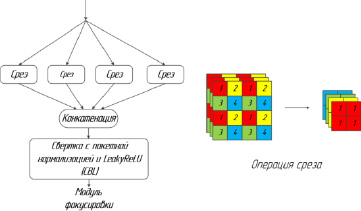
Рис. 2. Модуль фокусировки
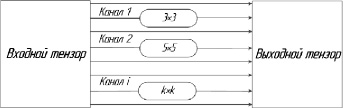
Рис. 3. Смешанная свертка (MixConv – mix convolution)
После этого информация о ширине и информация о высоте были объединены в пространство канала, а входное пространство было расширено в 4 раза. Таким образом, объединенное изображение имело 12 каналов, в то время как исходное изображение имело только 3 канала. Наконец, новое изображение было свернуто для получения двух карт объектов с понижающей дискретизацией без каких-либо отсутствующих данных. В этом случае была получена карта объектов размером 256× 256× 12.
Как показано в правом нижнем углу на рис. 2, после операции разрезания изображения изображение размером 4 × 4 × 3 было изменено на карту объектов размером 2 × 2 × 12. После свертки с каналом 64 вывод с размером 256 × 256 × 64 было получено. Модуль фокусировки может помочь уменьшить вычислительную нагрузку при понижающей дискретизации, но он не приведет к отсутствию каких-либо данных. Таким образом, модуль фокусировки может сохранять более полные данные с уменьшением изображения для последующего извлечения объектов [4].
Модуль смешанной свертки. Следующий модуль смешанной свертки (MixConv – mix convolution) (рис. 3) и модуль CSP1_1 не изменили размер, и размер изображения по-прежнему составлял 128 × 128 × 128 после этих двух модулей.
Смешанная свертка (MixConv – mix convolution) смешала различные размеры ядра (3 × 3, 5 × 5 и 7 × 7) в одной операции свертки, так что различные шаблоны с различными разрешениями могут быть легко зафиксированы.
Входной тензор имеет форму h, w, c и обозначается как X(h, w, c),
где h – высота,
w – ширина,
c – размер канала.
Сверточное ядро по глубине может быть обозначено как W(k, k, c, m), где k × k относится к размеру ядра, c относится к размеру входного канала, а m относится к множителю канала.
Чтобы упростить анализ, предполагаем, что ядро имеет одинаковую ширину и высоту (k). С учетом этого предположения для выходного тензора Y(h, w, c*m) были получены одинаковые формы h, w и умноженный размер выходного канала m?c. Карта характеристик каждого выходного сигнала может быть рассчитана с помощью формулы
 (1)
(1)
Как показано на рис. 5, каналы были разделены на несколько групп с помощью смешанной свертки, и разные размеры ядра были применены к разным группам. Более конкретно, входной тензор был разделен на g групп виртуальных тензоров, т.е.  . Пространственная высота и ширина всех виртуальных тензоров были одинаковыми, то есть h и w соответственно. Кроме того, общий размер канала этих виртуальных тензоров был таким же, как и у исходного входного тензора, т.е. c1 + c2 + ... + cg = c. Аналогично, сверточное ядро также было разделено на g групп виртуальных ядер
. Пространственная высота и ширина всех виртуальных тензоров были одинаковыми, то есть h и w соответственно. Кроме того, общий размер канала этих виртуальных тензоров был таким же, как и у исходного входного тензора, т.е. c1 + c2 + ... + cg = c. Аналогично, сверточное ядро также было разделено на g групп виртуальных ядер  .
.
Соответствующий виртуальный выходной сигнал для t-й группы виртуальных входных тензоров и ядер может быть вычислен по уравнению

 (2)
(2)

Рис. 4. Свертка с пакетной нормализацией и LeakyReLU (CBL)
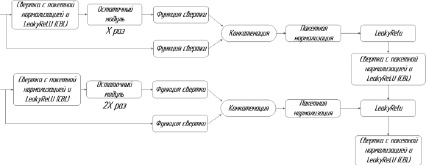
Рис. 5. (а) Многоступенчатая частичная сеть (CSP – Cross Stage Partial Network) 1_X, (б) Многоступенчатая частичная сеть (CSP) 2_X
Конечный выходной тензор может быть получен путем объединения всех виртуальных выходных тензоров:
 (3)
(3)
Размер канала конечного выходного сигнала равен z0 = z1 + ... + zg = m · c.
Смешанная свертка (MixConv – mix convolution) смешивала различные размеры ядра (3 × 3, 5 × 5 и 7 × 7) в одной операции свертки, чтобы можно было легко захватывать различные шаблоны с различными разрешениями [5].
Модуль свертки с пакетной нормализацией и LeakyReLU. Следующим шагом был модуль свертки с пакетной нормализацией и LeakyReLU (CBL – Convolution with Batch normalization and LeakyRelu) (рис. 4), который изменил размер изображения на 64 × 64 × 256. Затем модуль свертки не внес никаких изменений в изображение, и размер по-прежнему составлял 64 × 64 × 256. После этого модуль CSP1_3 не изменил размер вывода. Таким образом, выходной сигнал размером 64 × 64 × 256 был записан как P1.
Модуль свертки с пакетной нормализацией и LeakyReLU (CBL – Convolution with Batch normalization and LeakyRelu) в основной сети состоял из функции свертки, пакетной нормализации и LeakyReLU. Остаточный блок использовался в многоступенчатой частичной сети (CSP – Cross Stage Partial Network). Как показано на рис. 5, б, остаточный модуль состоял из двух блоков CBL, которые были подключены непрерывно. Исходный ввод и вывод 2-го модуля свертки с пакетной нормализацией и LeakyReLU (CBL – Convolution with Batch normalization and LeakyRelu) выполняли функцию сложения векторов в качестве выходных данных [6].
Модуль многоступенчатой частичной сети. CSP1_X изображен на рис. 5 в верхней части. Исходный ввод CSP1 проходил через модуль свертки с пакетной нормализацией и LeakyReLU (CBL – Convolution with Batch normalization and LeakyRelu) и X остаточных модулей (ResUnit) (рис. 6). В конце концов он выполнил сверточную функцию для получения временного вывода основного пути. Тем временем исходный ввод выполнил другую сверточную функцию, прошел по другому пути, а затем объединился с выводом основного пути. Результат прошел через нормализацию пакета, LeakyReLU и свертки с пакетной нормализацией и LeakyReLU (CBL – Convolution with Batch normalization and LeakyRelu).
CSP2_X описан на рис. 5 в нижней части, и его структура немного отличается от CSP1_X. В CSP2_X основной путь состоял из 2*X кратных единиц свертки с пакетной нормализацией и LeakyReLU (CBL – Convolution with Batch normalization and LeakyRelu) вместо повторного объединения в CSP1_X.

Рис. 6. Остаточный модуль (ResUnit)
Исходный ввод CSP2_X прошел через 2*X единицы CBL, а затем сверточную функцию, чтобы получить временный вывод основного пути. Тем временем исходный ввод выполнил другую сверточную функцию, прошел по другому пути, а затем объединился с выводом основного пути. Результат прошел через пакетную нормализацию, LeakyReLU.
В деталях CSP улучшает обучаемость сверточной нейронной сети, сокращает вычислительную сложность, обеспечивает высокую точность и малый вес, а также снижает стоимость памяти. CSP может интегрировать изменения градиента в карту объектов от начала до конца, что может снизить вычислительные затраты при обеспечении точности.
Следующим шагом был модуль CBL, который изменил размер выходного сигнала на 32 × 32 × 512. Затем модуль MixConv не внес никаких изменений в размер, и модуль CSP1_3 на следующем шаге также не изменил размер. Вывод здесь размером 32 × 32 × 512 был записан как P2.
Следующим шагом был модуль CBL, который изменил размер на 16 × 16 × 1024. Затем модуль MixConv и модуль пуллинга пространственных пирамид (SPP – Spatial Pyramid Pooling) на следующем шаге не изменили размер вывода. Вывод здесь размером 16 × 16 × 1024 был записан как P3 [7].
Заключение
В данной статье продемонстрирована система распознавания дорожных знаков распознавания дорожных знаков, основанная на сверточной нейронной сети, для повышения точности обнаружения и распознавания дорожных знаков [8].
Библиографическая ссылка
Чулин К.В., Белов Ю.С. РАЗРАБОТКА СИСТЕМЫ РАСПОЗНАВАНИЯ ДОРОЖНЫХ ЗНАКОВ НА ОСНОВЕ ОДНОСТУПЕНЧАТОГО ДЕТЕКТОРА // Научное обозрение. Технические науки. 2022. № 3. С. 36-41;URL: https://science-engineering.ru/ru/article/view?id=1398 (дата обращения: 27.07.2026).
DOI: https://doi.org/10.17513/srts.1398