

 science-review.ru
science-review.ru
Системы передачи информации по гидроакустическому каналу можно классифицировать по различным признакам: дальности действия, скорости передачи данных, вероятности появления ошибок, потребляемой мощности и т.д. При классификации по скорости передачи данных и вероятности появления ошибок все системы передачи информации условно могут быть разделены на следующие две группы: системы, используемые для телеуправления и получения информации о состоянии подводных аппаратов и станций, и системы, предназначенные для передачи значительных объемов информации с подводного аппарата (станции) или передачи на подводный аппарат (станцию). Далее рассмотрим методы передачи сигналов по гидроакустическому каналу в системах гидроакустической связи со сверхмалым потреблением, предназначенных для телеуправления и получения информации о состоянии подводных аппаратов на расстоянии до нескольких километров при наличии сильных искажений в гидроакустическом канале.
Целью исследований является разработка и создание современных методов цифровой гидроакустической связи. Методы передачи информации по гидроакустическому каналу в водной среде непосредственно связаны с характеристиками самого гидроакустического канала связи. Практически во всех случаях основными особенностями гидроакустического канала связи является наличие нескольких путей (лучей) распространения звука от передающего модуля к приемному модулю связи, а также наличие допплеровского сдвига частоты принимаемого сигнала. При относительно небольших расстояниях наличие дополнительных лучей вызвано, как правило, однократным или многократным отражением звука от дна и поверхности воды. Сигналы, отраженные от дна и поверхности воды, интерферируют с прямым лучом и друг с другом. Поскольку копии сигнала, распространяющиеся по нескольким путям (лучам), имеют различные задержки, интерференция в точке приема приводит к искажению формы сигнала, что в свою очередь уменьшает отношение сигнал/шум. Поэтому пропускная способность системы связи и вероятность ошибки ограничиваются интенсивностью, задержками и скоростью изменения задержек дополнительных лучей в точке приема. В зависимости от соотношения задержек дополнительных лучей с частотно-временными характеристиками передаваемого сигнала, можно выделить следующие виды искажений сигнала в точке приема. Гладкие замирания, а именно изменение амплитуды сигнала в точке приема, вызванное внутрисимвольной интерференцией. В этом случае многолучевая задержка меньше длительности одного элемента сигнала. С другой стороны, частотно-селективные замирания – вид замираний, вызванный межсимвольной интерференцией. В этом случае многолучевая задержка больше длительности одного элемента сигнала. Наличие быстрых замираний – это вид искажений принимаемого сигнала и возникает в том случае, когда интервал корреляции замираний меньше длительности элемента сигнала, т.е. быстрые замирания приводят к частичному или полному разрушению когерентной структуры сигнала. Кроме того, этот вид замираний приводит к наибольшим искажениям в принимаемом сигнале. Следует отметить, что в зависимости от профиля дна, состояния поверхности воды, взаимного расположения и скорости перемещения корреспондирующих точек, а также частотно-временных характеристик передаваемого сигнала, в связном гидроакустическом канале могут возникать любые из перечисленных искажений. Кратко перечислим наиболее распространенные методы компенсации искажений гидроакустического сигнала в зависимости от типа замираний. Это разделение лучей во временной области путем расширения спектра сигнала, прием с пространственным разнесением, выравнивание спектра, расширение спектра, использование помехоустойчивой системы демодуляции, введение избыточности в передаваемое сообщение, комбинация избыточности и некогерентного приема [1, 2].
Материалы и методы исследования
Использование направленных антенн в ряде случаев позволяет превратить многолучевой канал в один или несколько однолучевых каналов. В качестве направленной антенны может быть использована антенна как с фиксированной, так и с перестраиваемой диаграммой направленности. Использование антенны с фиксированной диаграммой направленности позволяет создать простую по конструкции, но весьма неудобную в эксплуатации систему гидроакустической связи. Использование антенны с перестраиваемой (адаптивной) диаграммой направленности в ряде случаев может оказаться весьма эффективным средством борьбы с многолучевостью, однако при малой разнице в углах прихода различных лучей приемная гидроакустическая антенна должна иметь значительные габариты, а адаптивный синтез диаграммы направленности требует значительного объема вычислений. Как можно понять из сделанного краткого обзора, а также многочисленной литературы, посвященной методам передачи данных по многолучевым каналам, цифровая гидроакустическая связь подводного аппарата, как правило, состоит из двух подсистем: телеуправления и передачи данных. Подсистема телеуправления характеризуется малым энергопотреблением, имеет сравнительно небольшую производительность и сохраняет работоспособность в широком диапазоне изменений характеристик гидроакустического канала. Подсистема передачи данных функционирует со значительно большей производительностью, однако обладает повышенной чувствительностью к характеристикам гидроакустического канала.
Рассмотрим функциональную схему цифровой связи. Основные связи гидроакустических систем телеуправления и передачи данных между собой и с другими устройствами подводного аппарата схематически представлены на рис. 1. Система телеуправления используется для включения или выключения, а также для изменения режима работы системы передачи данных, датчиков и других систем подводного аппарата. Кроме того, низкоскоростной канал телеуправления может быть использован для получения информации о состоянии различных подсистем подводного аппарата. В канале телеуправления для компенсации многолучевости в условиях сильного изменения характеристик гидроакустического канала, используется комбинация избыточности и некогерентного приема сигнала. Поскольку такой метод приема не позволяет передавать данные со значительной скоростью, в гидроакустической системе передачи данных должен быть использован другой метод компенсации многолучевости, например эквалайзер.
Выполнено моделирование системы цифровой гидроакустической связи. Передача цифровой информации используется в радиосвязи уже много лет и в последнее время широко вошла в наш быт (например, в сотовых телефонах). Однако в гидроакустике она стала применяться лишь в последние годы. Это связано с особенностями распространения звука в океане, скорость которого на несколько порядков ниже скорости электромагнитных волн. Два фактора особенно важны в этой связи: во-первых, это многолучевое распространение звука в толще воды по различным путям и вследствие многократных донно-поверхностных отражений. В результате основной помехой в этом случае является не аддитивный шум, а реверберация звука, связанная с самим сигналом. Поэтому увеличение мощности сигнала приводит к пропорциональному увеличению помехи и не улучшает отношение сигнал/шум. Для радио и телефонной связи этот фактор также имеет место, в частности, как результат многократных отражений, однако затягивание сигнала за счет реверберации здесь невелико. Это затягивание измеряется в величинах количества интервалов временной корреляции огибающей сигнала и составляет единицы, в то время как для гидроакустики затягивание сигнала составляет десятки и сотни интервалов. Разработанный уже давно в радиосвязи метод так называемой «адаптивной эквализации», в котором адаптивно строится обратный фильтр, позволяющий восстановить исходный сигнал, искаженный многолучевым распространением и многократными отражениями, оказывается для гидроакустики в ряде случаев неэффективным вследствие плохой сходимости адаптивного фильтра при длительных растяжениях сигнала. В особенности это относится к распространению в мелком море. Второй важнейший фактор – это значительный эффект Допплера за счет движения излучателя и/или приемника, а также временных изменений среды, в частности движения поверхности океана, который из-за низкой скорости звуковых волн также на много порядков выше, чем для радиоволн. Метод адаптивной эквализации для эффективной работы требует малости величины произведения временного затягивания сигнала ΔТ и допплеровского расширения ΔF (ΔТ * ΔF << 1 (~ 10–3).
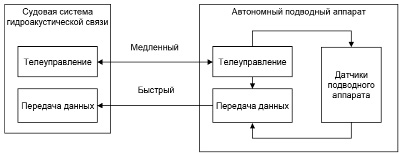
Рис. 1. Основные связи гидроакустических систем телеуправления и передачи данных между собой и с другими устройствами подводного аппарата
В ряде условий для гидроакустики (мелкое море, сильное волнение, большие скорости носителей) это условие может не выполняться. Большинство разработанных модемов для гидроакустической связи работают именно при этом условии, в частности при предположении, что допплеровские смещения хотя и имеются, но они одинаковы для всех путей распространения сигнала [3, 4].
Результаты исследования и их обсуждение
В результате проведенного анализа различных методов передачи данных по гидроакустическому каналу связи появилась возможность создания сверхмалопотребляющей и в то же время весьма помехоустойчивой системы гидроакустической связи, предназначенной для передачи команд и получения сжатой телеметрической информации даже в условиях быстрых замираний. Для компенсации быстрых замираний принимаемого сигнала используется комбинация введения избыточности в передаваемый сигнал и его некогерентного приема. Несмотря на то, что подобная система не использует энергии всех лучей в точке приема и обладает относительно невысокой пропускной способностью, она способна обеспечивать связь практически в любых условиях многолучевого распространения при использовании относительно несложного алгоритма приема. Простота алгоритма приема информации в сочетании с современными сверхмалопотребляющими цифровыми и аналоговыми компонентами приводит к существенному снижению энергопотребления гидроакустического приемника и позволяет создавать автономные устройства, не требующие смены источников питания в течение года, а в случае необходимости и нескольких лет. Конструктивно разработанный макетный образец системы гидроакустической связи (рис. 2) состоит из следующих узлов:
− Гидрофон.
− Гидрофонный усилитель.
− Микропроцессорный модуль со схемой управления усилителем мощности и встроенным аналого-цифровым преобразователем.
− Усилитель мощности гидроакустического излучателя.
− Гидроакустический излучатель.
− Источник питания.
В качестве гидрофона может быть использован практически любой гидрофон с чувствительностью не менее нескольких десятков мкв/Па и рассчитанный для работы на тех глубинах, на которых предполагается эксплуатация системы гидроакустической связи. В данном случае был использован гидрофонный модуль, имеющий чувствительность 120 мкв/Па и рассчитанный на работу на глубине до 6000 м. Для снижения уровня интермодуляционных искажений при большом уровне сигнала, в качестве гидрофонного усилителя использован полосовой усилитель со ступенчато изменяемым коэффициентом усиления 60 или 80 дБ. Известны два основных способа реализации полосовых усилителей: с использованием активных полосовых фильтров или с использованием пассивных полосовых фильтров. Основным преимуществом активных полосовых фильтров является отсутствие катушек индуктивности, а недостатком является значительно большее энергетическое потребление по сравнению с пассивными фильтрами. Поскольку в описываемой системе одной из основных характеристик является потребляемая мощность в режиме приема, гидрофонный усилитель реализован с использованием пассивных полосовых фильтров. В качестве усилительных элементов использованы супер-бета-транзисторы, способные давать усиление в несколько десятков децибел при работе в килогерцовом диапазоне частот, потребляя при этом ток не более 10–20 мка. На рис. 3 приведена блок-схема усилителя.
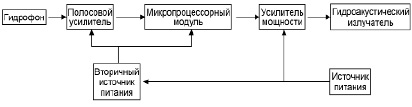
Рис. 2. Блок-схема системы гидроакустической связи
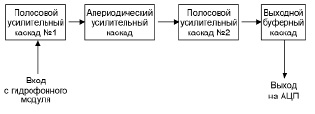
Рис. 3. Блок-схема усилителя
Полосовые усилительные каскады № 1 и 2 имеют коэффициент усиления 30 дБ и полосу пропускания 300 Гц. Для уменьшения неравномерности частотной характеристики усилителя в рабочем диапазоне частот, центральные частоты полосовых каскадов сдвинуты друг относительно друга. Коэффициент усиления апериодического усилительного каскада устанавливается равным 0 или 20 дБ с помощью перемычки. Выходной буферный каскад предназначен для согласования выходного сопротивления полосового усилительного каскада № 2 с входным сопротивлением аналого-цифрового преобразователя. Усиление этого каскада равно 0 дБ. Средняя частота полосы пропускания гидрофонного усилителя равна 7000 Гц, ширина полосы пропускания 800 Гц. Рабочее напряжение питания составляет 1.8–3.6 В. Потребляемый ток составляет не более 70 мка.
Весь процесс обработки принимаемых сигналов, включая аналого-цифровое преобразование, а также генерация передаваемых сигналов производится с помощью микропроцессорного модуля. Математическое обеспечение микропроцессорного модуля, реализующее алгоритм гидроакустической связи, включает в себя ряд программных модулей (модули: «main.c», «adc12.c», «lkhi.c»). В программном модуле «main.c» вызывается ряд функций, обеспечивающих начальную инициализацию встроенной периферии микропроцессора (генераторы тактовых частот, аналого-цифровой преобразователь, порты ввода-вывода, последовательный интерфейс и т.д.). Кроме того, устанавливаются начальные значения некоторых переменных. Модуль «adc12.c» содержит функцию начальной инициализации аналого-цифрового преобразователя микропроцессора. Модуль «lkhi.c» содержит функции начальной инициализации встроенных таймеров, а также функцию обработки прерываний от аналого-цифрового преобразователя со средней частотой 28 кГц (учетверенная несущая частота). Частота прерываний задается с помощью программно-аппаратного частотного синтезатора. В этом же программном модуле производится предварительная фильтрация (интегрирование) отсчетов, поступающих с аналого-цифрового преобразователя. В качестве усилителя мощности может быть использован практически любой ключевой или линейный усилитель с выходной мощностью в несколько десятков ватт, способный работать на гидроакустический излучатель. В качестве гидроакустического излучателя пригоден любой излучатель с рабочей полосой частот 6500–7500 Гц, хорошим КПД и рассчитанный на мощность не менее чем несколько десятков ватт. Напряжение питания как цифровой, так и аналоговой части (за исключением усилителя мощности) может находиться в пределах 1.8–3.6 В. Потребляемый от этого источника питания ток не более 2 ма. Характеристики источника питания усилителя мощности определяются напряжением питания и током потребления усилителя мощности [5].
Заключение
Одним из возможных применений создаваемой системы гидроакустической связи является ее использование для дистанционного управления режимами работы и получения информации о состоянии, например, автономной донной станции. Разработанная гидроакустическая связь смонтирована в комплексе с усовершенствованным блоком управления в унифицированном сменном модуле донной станции. Была также разработана усовершенствованная судовая часть системы гидроакустической связи. Разработан и создан новый вариант приемно-излучающей гидроакустической антенны: обновлены схемы излучателя, работающие в требуемом диапазоне частот, обновлены также гидрофоны, гидрофонные предусилители, изменена компоновка антенны. Выполнена унификация программного обеспечения и электронного оборудования. В качестве судового блока гидроакустической связи оказалось возможным использовать блок, идентичный блоку гидроакустической связи автономной донной станции. Комплекс гидроакустической связи, устанавливаемый на судне, отличается от блока донной станции только конструкцией гидроакустической антенны, а также тем, что к судовому блоку подключен компьютер для визуализации информации, поступающей с донной станции, а также для ввода оператором команд, которые необходимо передать на автономную донную станцию. Испытания подсистемы гидроакустической связи показали, что предлагаемый вариант подсистемы надежно обеспечивает обмен цифровой информацией с автономными подводными аппаратами на значительных расстояниях в условиях многолучевого распространения звука при чрезвычайно низком (2–8 мВт в зависимости от напряжения источника питания) энергопотреблении приемной части системы.
Библиографическая ссылка
Лискин В.А., Римский-Корсаков Н.А., Гамазов Н.И. ИССЛЕДОВАНИЕ И РАЗРАБОТКА ЭКСПЕРИМЕНТАЛЬНОГО ОБРАЗЦА ПОДСИСТЕМЫ ЦИФРОВОЙ ГИДРОАКУСТИЧЕСКОЙ СВЯЗИ ОКЕАНОЛОГИЧЕСКИХ КОМПЛЕКСОВ // Научное обозрение. Технические науки. 2023. № 1. С. 26-31;URL: https://science-engineering.ru/ru/article/view?id=1423 (дата обращения: 28.06.2026).
DOI: https://doi.org/10.17513/srts.1423