

 science-review.ru
science-review.ru
Вычисление пути пешеходов (PDR) использует метод обнаружения шагов, чтобы определить, сделал ли пешеход шаг, затем оценивает длину шага и направление ходьбы для этого шага и наконец вычисляет координаты положения этого шага, комбинируя координаты положения предыдущего шага. Принцип следующий:
 (1)
(1)
где  – координата положения шага i;
– координата положения шага i;
Li+1 – предполагаемый размер шага i+1;
θi+1 – предполагаемое направление шага i+1;
 – координата положения шага i+1.
– координата положения шага i+1.
Таким образом, PDR в основном включает четыре части: определение начального положения, определение шага, оценку размера шага и оценку направления.
Фактическое измеренное значение RSS и расстояние не удовлетворяют строгому монотонному убывающему соотношению, в результате чего кривая RSS обычно имеет несколько пиков. Точное обнаружение истинных пиков имеет решающее значение для позиционирования Bluetooth.
Традиционным методом обнаружения пиков является метод скользящего окна. Сначала алгоритм скользящего среднего используется для сглаживания и фильтрации кривой RSS, чтобы максимально уменьшить количество ложных пиков, затем определяется пиковое значение в соответствии с определением формулы (5), пиковое значение меньше, чем А, тогда А считается реальным пиковым значением. Однако помехи RSS в разных местах различны, и скорость ходьбы пользователей также каждый раз разная, в результате чего количество и расстояние пиков на кривой RSS не являются фиксированными, поэтому ширину T скользящего окна нельзя определить.
Кроме того, традиционный метод скользящего окна имеет определенную временную задержку при обнаружении пикового значения, что приводит к тому, что пешеходы уже прошли определенное расстояние между моментом появления пикового значения и моментом обнаружения пикового значения. Если положение PDR корректируется непосредственно с помощью координат положения базовой станции, возникнут определенные ошибки.
Для решения проблемы кумулятивной ошибки при подсчете пешеходов (Pedestrian Dead Reckoning, PDR) предлагается улучшенный метод позиционирования PDR, основанный на коррекции пиков Bluetooth. Усовершенствованный метод пикового обнаружения RSS используется для обнаружения базовой станции Bluetooth и используется для корректировки положения PDR, размер шага PDR оценивается в соответствии с расстоянием между ориентирами, а направление гироскопа корректируется. Этот метод не требует создания базы данных отпечатков пальцев или модели распространения беспроводного сигнала и в то же время сохраняет процесс автономной модели размера шага обучения. Экспериментальные результаты показывают, что по сравнению с традиционным PDR точность позиционирования этого метода значительно повышается.
Материалы и методы исследования
Определение начального положения. PDR не может обеспечить начальное положение для себя и обычно обеспечивается другими технологиями позиционирования (такими как начальное позиционирование Wi-Fi) или искусственно выбирает определенное место в качестве точки отсчета [1].
Обнаружение шагов. Поскольку ходячее состояние человека является периодическим процессом, то и ускорение имеет очевидную периодичность. Наиболее популярным методом детектирования ступеней в настоящее время является пошаговый метод подсчета пиков, то есть каждый пик соответствует пройденному шагу, а общее количество пиков равно количеству пройденных шагов. Однако из-за шума в данных об ускорении, измеренных датчиком, много ложных пиков мешают подсчету шагов (как показано на рис. 1), поэтому сначала используется фильтр для фильтрации шума. Учитывая, что при обычной ходьбе человек может сделать до трех шагов за одну секунду (что соответствует трем пикам за одну секунду на кривой ускорения), выбирается фильтр нижних частот Баттерворта с частотой среза 3 Гц. Окончательно подсчитанные пики – это количество предпринятых шагов [2].
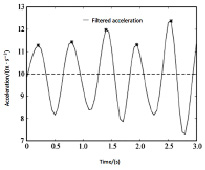
Рис. 1. Этапы расчета PDR
Оценка шага. В настоящее время существует множество методов оценки размера шага, но для большинства из них необходимо создать математическую модель для описания взаимосвязи между размером шага и характеристиками походки. Более зрелые модели размера шага в основном включают (1) Модель нелинейного размера шага [3]. Чем больше изменение ускорения, тем больше длина шага L, формула выглядит следующим образом:
 (2)
(2)
где amax и amin – максимальное значение и минимальное значение данных ускорения за один шаг соответственно, K – параметр модели.
(2) Линейная ступенчатая модель [4]. Чем выше скорость ходьбы (чем больше шагов делается в единицу времени, т. е. больше частота шагов), тем больше длина шага L. Формула выглядит следующим образом:
L = a × f × b, (3)
где f – частота шага, a и b – параметры модели.
Принцип пикового позиционирования Bluetooth. Исследования показали, что теоретически мощность беспроводного сигнала имеет логарифмическую зависимость от расстояния распространения, и формула выглядит следующим образом:
 (4)
(4)
где x0 – эталонное расстояние (обычно выбирается равным 1 м); P0 – уровень принимаемого сигнала (RSS, единица измерения: дБм) в точке x0; Px – значение RSS в точке x; λ – коэффициент потерь на трассе (обычно между 2 и 4).
Если предполагать, что пешеход проходит мимо базовой станции Bluetooth, расстояние между пешеходом и базовой станцией должно сначала постепенно уменьшаться, а затем постепенно увеличиваться с течением времени. Теоретически изменение расстояния приведет к тому, что RSS, полученный мобильным телефоном, сначала увеличится, а затем уменьшится, и имеется только одно пиковое значение [5].
Очевидно, что, когда возникает пик, пользователь находится ближе всего к Bluetooth (находится ближе к низу). Следовательно, после обнаружения пика RSS положение PDR можно скорректировать с помощью заранее известных координат базовой станции Bluetooth, тем самым немедленно уменьшив кумулятивную ошибку PDR [6]. Первоначально RSSt определяется как пиковое значение, когда выполняются следующие условия:
RSSt > RSSt–1 и RSSt > RSSt+1 (5)
где RSSt – мощность принимаемого сигнала в момент времени t.
Улучшенный метод обнаружения пиков RSS. В этой статье метод PDR используется для оценки смещения пешеходов во время обнаружения пика RSS [7], а затем оценочное смещение добавляется к координате положения базовой станции Bluetooth B, чтобы получить координаты положения пользователя C, когда пик детектируется (формула (5)).
 (6)
(6)
где  представляет собой координаты местоположения пользователя в момент появления пикового значения; C представляет собой смещение пешехода в течение периода обнаружения пика, которое можно оценить
представляет собой координаты местоположения пользователя в момент появления пикового значения; C представляет собой смещение пешехода в течение периода обнаружения пика, которое можно оценить  с помощью PDR;
с помощью PDR;
K представляет собой количество пройденных шагов;  представляет координаты местоположения пешехода при обнаружении пикового значения [8].
представляет координаты местоположения пешехода при обнаружении пикового значения [8].
Коррекция ориентира Bluetooth PDR. Принимая во внимание высокую точность краткосрочного позиционирования PDR и большую кумулятивную ошибку после длительного времени, в разделе 2.2 предлагается использовать местоположение ориентиров Bluetooth для корректировки предполагаемого местоположения PDR, тем самым уменьшая кумулятивную ошибку [9]. Кроме того, он также может использовать ограничения направления ходьбы людей в специальных помещениях (например, в коридорах) для корректировки размера шага и направления PDR, а также для дальнейшего повышения точности позиционирования PDR [10].
Коррекция размера шага PDR. Традиционная PDR [11] требует построения математической модели для описания взаимосвязи между размером шага и характеристиками походки (например, модели с двумя размерами шага в разделе 1.3), но в построении модели есть ошибки; кроме того, необходимо собирать данные об ускорении на автономном этапе и данные о размере шага, но параметры модели у разных пользователей неодинаковы [12].
Поскольку длина шага человека мало меняется в процессе ходьбы, ее можно приблизительно унифицировать как фиксированную длину шага. Предполагая, что S – это расстояние между двумя базовыми станциями Bluetooth, а N – количество статистических данных обнаружения походки, средняя длина шага L может быть выражена как
L = S / N, (7)
Коррекция направления PDR. Долгосрочный эффект гироскопа не так хорош, как у компаса. Он имеет высокую точность позиционирования в краткосрочной перспективе и не нарушается аномальными магнитными полями. Поэтому корректировка гироскопа время от времени с надежным направлением может подавить накопление ошибок гироскопа. Принимая во внимание ограничения коридоров и стен на направление ходьбы людей в условиях помещения, при обнаружении пикового значения Bluetooth RSS сначала оценивается, к какой базовой станции Bluetooth находится пользователь, согласно UUID, а затем базовая станция Bluetooth определяет идет ли пешеход вперед или назад, в соответствии с разницей между предполагаемым направлением гироскопа и ориентацией коридора.
Результаты исследования и их обсуждение
Чтобы проверить эффективность позиционирования метода, описанного в этой статье, в коридоре были проведены следующие эксперименты. Экспериментатор ходит по центру коридора шириной 2,4 м с мобильным телефоном, и мобильный телефон собирает данные, такие как ускорение, угловая скорость и напряженность магнитного поля с частотой дискретизации 20 Гц. На потолке коридора установлено 5 базовых станций Bluetooth (в среднем по одной каждые 20 м), частота вещания – 10 Гц. Дистанция ходьбы составила 144 м, повторенная несколько раз, со средним временем 2 мин 6 с. (1) Сравните улучшенный PDR с традиционным PDR. Согласно различным методам оценки размера и направления шага, в традиционной PDR есть три схемы, а именно: Схема 1: Используйте изменение ускорения для расчета длины шага (показанного в формуле (2)), используйте компас для расчета направления, наконец, используйте традиционный метод PDR для определения положения каждого шага. Схема 2: Используйте частоту шага (формула (3)) для расчета длины шага, используйте компас для вычисления направления, наконец, используйте традиционный метод PDR для определения положения каждого шага. Схема 3: Используйте частоту шага для расчета длины шага, используйте гироскоп (формула (4)) для вычисления направления и, наконец, используйте традиционный метод PDR, чтобы получить положение каждого шага.
Схема 4: улучшенный PDR в этой статье использует пять базовых станций Bluetooth для корректировки положения, размера шага и направления PDR, тем самым уменьшая совокупную ошибку PDR.
На рис. 2 показана предполагаемая траектория. Видно, что эффект четырех схем на начальном этапе позиционирования очень хороший, но со временем схема позиционирования на основе традиционной ПДР постепенно отклоняется от реальной траектории из-за накопления ошибок, а схема 4 (улучшенный PDR в этой статье) использует базовую станцию Bluetooth. PDR периодически корректируется, что гарантирует, что расчетная траектория всегда близка к истинной траектории. Кроме того, по сравнению с традиционной схемой PDR видно, что оценка направления схемы 1 и схемы 2 исходит от компаса, но точность позиционирования схемы 1 выше, чем у схемы 2, что указывает на то, что оценка размера шага модель по частоте шагов хуже модели оценки величины шага по ускорению, по сравнению со схемой 2 схема 3 лучше работает на начальном этапе позиционирования, но по мере накопления ошибок гироскопа эффект позиционирования постепенно уступает схеме 3, который использует компас для оценки направления, что дополнительно подтверждает вышеупомянутую точку зрения. Точность позиционирования компаса выше, чем у гироскопа после длительного времени.
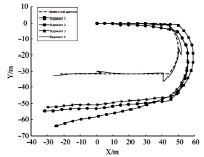
Рис. 2. Сравнение расчетной траектории четырех схем
На рис. 2 показана ошибка позиционирования каждого шага в эксперименте, видно, что ошибка позиционирования схемы 4 исправляется один раз в определенный период времени, а всего делается 5 исправлений (приходя на 18, 68, 104 и 104-й шаги соответственно), шаги 138 и 198, эффективно контролирующие максимальную ошибку позиционирования в пределах 5 м. На рис. 3 показана кумулятивная кривая распределения ошибки позиционирования (то есть вероятность того, что ошибка позиционирования меньше определенного значения), а на рис. 4 приведены средние значения ошибки позиционирования, максимальной ошибки позиционирования и среднеквадратической ошибки четырех схем. Можно увидеть, что коррекция пика Bluetooth может эффективно уменьшить ошибку позиционирования небольшого PDR.
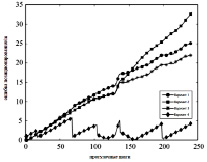
Рис. 3. Ошибка на шаг
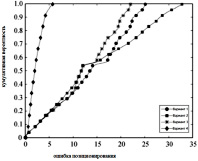
Рис. 4. Кумулятивная кривая распределения вероятности ошибки позиционирования
Заключение
Традиционный PDR не зависит от какой-либо инфраструктуры и может обеспечить непрерывные и стабильные результаты позиционирования, но существует проблема накопленных ошибок. В этой статье предлагается улучшенный метод позиционирования PDR, основанный на коррекции пика Bluetooth, который корректирует PDR по трем аспектам: положение, шаг размер и направление.
Библиографическая ссылка
Кожубаев Ю.Н., Имин Я.-. МЕТОДЫ ПОЗИЦИОНИРОВАНИЯ ПЕШЕХОДОВ, ОСНОВАННЫЕ НА КОРРЕКЦИИ ПИКОВОГО ШАБЛОНА BLUETOOTH // Научное обозрение. Технические науки. 2023. № 4. С. 22-26;URL: https://science-engineering.ru/ru/article/view?id=1444 (дата обращения: 24.06.2026).
DOI: https://doi.org/10.17513/srts.1444