

 science-review.ru
science-review.ru
Введение
В современном плавании одной из важнейших составляющих является техника спортивного плавания. Десятилетиями тренеры экспериментировали в поисках ответа на два основных вопроса: как снизить встречное гидродинамическое сопротивление телу пловца при его продвижении вперед с высокой скоростью и как увеличить мощность и эффективность гребков, продвигающих пловца вперед. Выявлялись и проходили проверку временем наиболее эффективные элементы движений и их согласования. Уточнялись взгляды на технику плавания с учетом закономерностей биомеханики. Так постепенно сложились общие требования к рациональной технике плавания. Суть методики сводится к следующему: тренер делает надводную или подводную видеозапись спортивной техники пловца в условиях тренировки или соревнований; анализирует технику по фазам цикла, сравнивая движения пловца с требованиями педагогической модели техники; делает выводы. С учетом выводов тренер вносит необходимые коррективы в процесс спортивной подготовки, подбирает необходимые технические упражнения, обсуждает проблему с пловцом и вводит новые методические установки и наглядные ориентиры [1, 2].
Цель работы – разработка модели бесплатформенной инерциальной навигационной системы (БИНС) для регистрации перемещений движителя пловца, направленной на улучшение алгоритмов обработки показаний чувствительных элементов, компенсации ошибок и оценки погрешностей.
Материалы и методы исследования
Технические требования:
• диапазон температур окружающей среды +50С …+400С;
• давление окружающей воздушной среды меняется в диапазоне от 700 до 800 мм рт. ст.;
• глубина погружения пловца не более 6 м;
• погрешность определения ориентации движителя пловца не более 1 градуса за 1 секунду;
• погрешность определения положения связанной с движителем пловца системы координат не более 1 мм за 1 секунду.
Из постановки задачи и анализа основных требований следует выделить несколько групп требований, имеющих определяющее значение с точки зрения принятия технических решений и принципов построения, а именно: требуемые точности определения ориентации и положения; определенный состав чувствительных элементов. Требования по температуре и давлению окружающей воздушной среды отводятся на второй план, тем не менее, в работе они учитываются.
БИНС построим на микромеханических гироскопах и акселерометрах [3]. Алгоритмы БИНС можно разделить на следующие блоки: алгоритм ориентации, блок пересчета, навигационный алгоритм [4, с. 128]. Если речь идет о навигации и, в частности, об операции определения пространственной ориентации объекта или, в данном случае, движителя пловца, то пловца можно сравнить с этим самым объектом [5, с. 43]. Проплывая из пункта А в пункт Б, пловец должен решить задачу навигации, т.е. реализовать программу траекторного движения, что включает в себя: определение фактического состояния движения объекта, предписание движения и задание движения объекта.
В данной работе решается первая задача – задача ориентации [6, 7]. Она может быть решена аналитически на основе измерений отдельных угловых параметров движения руки при последующем преобразовании полученных сигналов или их интегрировании. Алгоритм ориентации является одним из ответственных блоков БИНС, так как от него зависит точность выработки параметров ориентации, и, кроме того, по информации этого блока осуществляется пересчет вектора кажущегося ускорения из связанной системы координат в географическую [4, с. 123; 8, с. 141–145].
Для данной частной модели вводятся допущения. Первое: при формировании абсолютной угловой скорости географического трехгранника ωg не учитывается переносная угловая скорость, обусловленная вращением Земли вокруг своей оси, – ωпер. В результате этого в алгоритме меняется блок выработки составляющих угловой скорости ωg. Второе: при формировании абсолютной угловой скорости не учитывается составляющая относительного ускорения, вызванная изменением движения объекта вдоль сферической поверхности Земли с относительной угловой скоростью ωотн [4, с. 141].
Так как бассейн представляет собой прямоугольную ванну, жестко связанную с Землей, и пловец плывет вдоль одной из дорожек бассейна (т.е. всегда параллельно продольной стенке ванны), можно сделать вывод, что пловец плывет с постоянным курсом, а значит, по локсодромии. Локсодромия представляет собой логарифмическую спираль – линию двоякой кривизны, которая асимптотически стремится к полюсу [9]. Азимут движения пловца от начала дорожки бассейна до конца может быть произвольным, в зависимости от того, как ориентировано здание бассейна по отношению к северу, однако для наглядности результатов работы модели БИНС сделаем азимут нулевым, то есть дорожка направлена на север. Его движитель (кисть руки) при движении будет совершать сложное движение. Однако для отработки алгоритма регрессионной обработки результатов интегрирования показаний чувствительных элементов (ЧЭ) целесообразно задать приближенную, максимально простую модель движения руки: результат будет наглядным при сохранении общности методов обработки. Итак, кисть руки движется по окружности (рис. 1), совершая гармонические колебания по всем трем параметрам ориентации около нулевого положения (положения, при котором совпадают связанные и относительные оси 0XYZ).
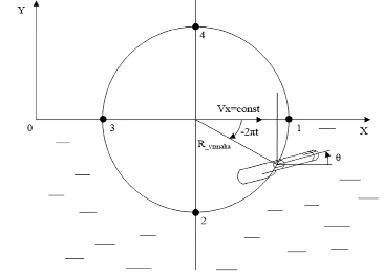
Рис. 1. Модель траектории движителя пловца
Параметры движения руки были выбраны из общих представлений о пловцах:
• период полного оборота (одного гребка) пловца принят равным Т = 1 с. Из этого следует, что частота вращения составляет 2π рад/с;
• длина руки (радиус окружности, по которой совершает движение кисть) принята равной R_vzmaha = 0,8 м;
• кисть руки движется равномерно по окружности, следовательно, акселерометры будут показывать только проекции центростремительного ускорения на связанные оси:
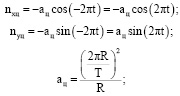
• углы ориентации задаются меняющимися по следующим законам:
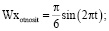
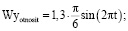
• проекции скорости руки в начальный момент времени должны быть нулевыми для корректной работы алгоритма автономного определения начальной ориентации. Поэтому для того, чтобы задать поступательную равномерную скорость (в ожидании пронаблюдать линейный в первом приближении рост координат поступательного движения на север – широты и относительной координаты Х), на первой секунде симуляции задается линейно нарастающий сигнал по проекции кажущегося ускорения, направленного вдоль линии движения пловца. Затем (после первой секунды) акселерометры измеряют только центростремительное ускорение, действующее на руку при равномерном движении по окружности радиуса R_vzmaha.
Результаты исследования и их обсуждение
Построенная модель представляет собой систему, состоящую из двух связанных алгоритмов БИНС. Первая БИНС, построенная на углах Эйлера–Крылова [10], выполняет функцию идеального моделирования поведения руки пловца, выдавая «чистые» сигналы ЧЭ, обусловленные эволюциями, совершаемыми рукой. Входом первого блока БИНС является модель траектории движителя пловца, описанная выше.
Далее сигналы ЧЭ проходят через блок добавления ошибок, в котором к «чистым» сигналам примешиваются ошибки ЧЭ: от рассогласования связанных осей и осей чувствительности ЧЭ (ошибка установки ЧЭ на плату), аддитивная (смещение нуля) и мультипликативная (изменение чувствительности) температурные погрешности, ограничение диапазона измерения, белый шум. Величины этих ошибок могут быть вычислены при известных показаниях встроенного в гироскоп термометра, а также полученных в ходе стендовых испытаний углах рассогласования связанных и чувствительных осей ЧЭ, и затем вычтены из «реальных» показаний ЧЭ (показаний с ошибками).
Далее показания ЧЭ (включая температуру, давление и время) могут быть записаны в файл с моделированием записи на флэш-носителе. Однако при идеальной работе аппарата записи-считывания этот пункт можно опустить и обработать «реальные» сигналы ЧЭ в одном цикле с их созданием во втором блоке БИНС.
а) 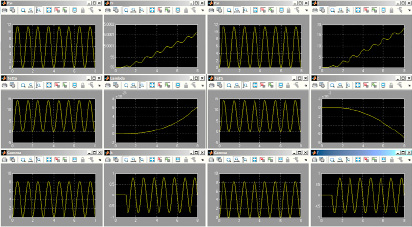
б) 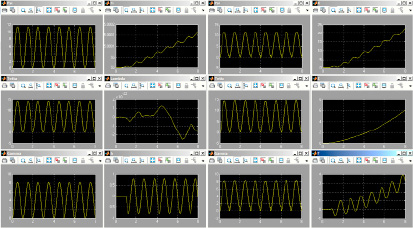
Рис. 2. Результаты моделирования: а) идеальная БИНС; б) БИНС с учетом ошибок
Второй блок, построенный по упрощенной схеме решения кинематического уравнения в кватернионах, является моделью алгоритма обработки (интегрирования) сигналов ЧЭ: предполагается сначала проинтегрировать показания, следуя алгоритму БИНС во втором блоке, а затем обработать получившиеся интегралы методами регрессионного анализа. На выходе второго блока БИНС углы ориентации руки по отношению к относительной системе координат (в данном случае совпадающем с географическим трехгранником с точностью до скорости и радиуса кривизны Земли на исследуемом участке пути) и навигационные параметры в относительных координатах.
Последовательность ввода ошибок выбрана следующая:
• ошибка от неточности установки ЧЭ на плате;
• мультипликативная составляющая ошибки от изменения чувствительности в зависимости от температуры;
• аддитивная составляющая ошибки от зоны нелинейности (нечувствительности) и смещения нуля в зависимости от температуры;
• ограничение выходного сигнала диапазоном измерения ЧЭ;
• дополнительное смещение нуля сигналов;
• белый шум.
Результат работы системы (графики координат местоположения объекта φ (широта), λ (долгота) и h (высота над уровнем моря) и параметров ориентации ψ, θ, γ) показаны на рисунке 2.
Генератор импульсов моделирует сигналы датчика давления: первую половину периода сигнал большой (рука в воде, единица), вторую половину периода сигнал маленький (рука в воздухе, ноль). Если предположить, что рука пересекает воду с нулевыми углами ориентации, то система будет работать лучше без дополнительной обработки, что демонстрирует рисунок 2б.
Заключение
В данной работе получена система, моделирующая поведение движителя пловца, а также моделирующая работу БИНС, отслеживающей это движение. Смоделировано поведение выходных параметров БИНС при обработке сигналов ЧЭ, сформированных в результате решения кинематической задачи; создан алгоритм компенсации температурных погрешностей и погрешностей установки ЧЭ на плату; отработаны методы регрессионного анализа, позволяющие устранить влияние нескомпенсированных погрешностей ЧЭ.
Выбраны чувствительные элементы системы. Этим требованиям среди датчиков угловой скорости наиболее полно отвечают микромеханические гироскопы, среди приборов, измеряющих линейные ускорения, – микромеханические акселерометры.
Как уже было сказано выше, в данной работе реализован алгоритм ориентации – один из ответственных блоков БИНС. Это служит хорошим базисом для дальнейшего решения навигационных задач движителя пловца.
Предполагается, что после внедрения таких систем будут составлены некие карты соответствия экспериментальной кривой траектории движителя идеальной траектории, с учетом всех биометрических особенностей спортсмена. Следовательно, в финальной стадии развития этого направления можно будет для каждого пловца с известными биометрическими данными (рост, вес, объемы мышц, длина рук и пр.) выдать необходимые рекомендации в целях улучшения техники автоматически, пользуясь точными формулировками, оперируя точными числами в описании гребка: на какой стадии гребка как повел себя движитель, достаточное/недостаточное усилие развил и пр.
Библиографическая ссылка
Лысова А.А., Пашнин С.В. БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ РЕГИСТРАЦИИ ОРИЕНТАЦИИ И ПЕРЕМЕЩЕНИЯ ДВИЖИТЕЛЯ ПЛОВЦА // Научное обозрение. Технические науки. 2024. № 6. С. 14-18;URL: https://science-engineering.ru/ru/article/view?id=1488 (дата обращения: 26.07.2026).
DOI: https://doi.org/10.17513/srts.1488