

 science-review.ru
science-review.ru
В комплексе подводных технических средств исследования и освоения Мирового океана большое место занимают глубоководные буксируемые комплексы (подводные робототехнические системы – ПРТС), работающие на глубинах свыше 2000 м. С их помощью можно проводить следующие работы:
– осмотр больших площадей океанского дна с помощью видеосистем;
– проведение гидроакустического профилирования морского дна;
– проведение разрезов в толще воды с целью измерения океанографических параметров;
– измерение аномалий геомагнитного поля;
– разведка и разработка подводных месторождений полезных ископаемых;
– взятие проб грунта.
Опыт использования глубоководных буксируемых аппаратов в ряде операций, связанных с поиском затонувших объектов, определением проявлений признаков подводных залежей углеводородов и залежей железо-марганцевых конкреций, картографированием океанского дна и др. показывает их эффективность и надежность. Основными достоинствами глубоководных буксируемых аппаратов являются длительный срок работы под водой, относительно невысокая стоимость, надежность и долговечность. К недостаткам следует отнести сложность управления движением буксируемого аппарата при детальном исследовании подводных объектов.
Основные группы буксируемых аппаратов по областям применения
Первая группа, включающая в себя узкофункциональные аппараты, достаточно многочисленна и предназначена для геофизической съемки больших площадей океанского дна. Аппараты этой группы конструктивно просты и оснащены оборудованием одного типа. Такими приборами являются либо акустические средства картирования дна, либо магнитометры, либо теле-видеосистемы. Информация от аппаратуры буксируемого аппарата передается по кабелю на борт обеспечивающего судна, где регистрируется, обрабатывается и хранится. На основе этой информации составляются различные геофизические, геологические, батиметрические и т.п. карты и разрезы.
Для проведения поиска объектов на дне применяются аппараты второй группы – многофункциональные поисковые буксируемые системы. Бортовое оборудование включает теле-видеосистемы, фотосистемы, гидролокаторы бокового обзора, акустические профилографы, вниз направленные гидролокаторы, эхолоты, магнитометры, гидрофизические датчики, отборники планктона и др. Комплексный состав оборудования позволяет проводить поисковые операции одновременно различными средствами. Аппараты этой группы часто используют и в научных целях для сбора и регистрации океанографических данных. Отличительным признаком поисковых буксируемых комплексов является сложная система управления движением с использованием судовых компьютерных комплексов и бортовых микрокомпьютеров.
При геофизических и поисковых работах возникает необходимость в проведении буксируемого аппарата по некоторой пространственной траектории, либо в удержании его на некотором отстоянии от дна. Буксировка на больших глубинах связана с применением длинной буксирной линии. Значительная масса троса и возникающие на нем силы гидродинамического сопротивления приблизительно на порядок превышают массу и на несколько порядков сопротивление самого аппарата. Перемещения аппарата в среде в основном определяются поведением буксирной линии. Управление движением пассивных аппаратов осуществляется изменением параметров движения судна (курса, скорости), а также длиной вытравленного кабель-троса. Таким образом, при таком способе управления глубину хода аппарата регулируют с помощью изменения длины троса, а перемещения в горизонтальной плоскости – маневрированием судна.
На малых скоростях буксировки, гидродинамические поверхности для изменения движения аппарата малоэффективны. Но в ряде разработок предпринимались попытки создать буксируемые системы с гидродинамическими дистанционно управляемыми рулями для изменения глубины хода и углов вращения буксируемого аппарата. Совместно с первым способом управления, применение гидродинамических активных рулей позволяет более точно проводить поисковые операции в сравнении с предыдущим способом.
Наиболее эффективное управление обеспечивает третий способ управления, при котором буксируемый аппарат обладает активными движителями и имеет возможность перемещаться независимо от движения буксируемой линии. Такие глубоководные системы сочетают в себе достоинства буксируемых и телеуправляемых по кабелю аппаратов. Известно несколько систем такого типа, состоящих из пассивного буксируемого тела, которое несет на себе телеуправляемый аппарат, связанный с буксируемым носителем тонким кабелем. При входе в требуемую зону буксируемый носитель ложится на грунт, а телеуправляемый аппарат обследует интересующий объект [1–3].
Способы управления движением и математические модели
По существу, буксируемый комплекс представляет собой систему двух тел с гибкой связью – буксирным тросом. Причем управляющие силы приложены к одному из тел – судну, а другое тело – буксируемый аппарат – должно двигаться по заданной траектории. Управление движением механической системы такого типа представляет собой довольно сложный процесс.
В основу управления движением глубоководных буксируемых аппаратов, разрабатываемых в ИО РАН, заложен прямой метод управления. Прямой метод управления целесообразно применять для таких маршрутов буксировки, в которых динамика системы судно – кабель – аппарат априорно известна, например таких, как разворот буксируемого аппарата при выходе в заданную точку, движение параллельными галсами, по спирали, по циклоиде и др. В каждом выбранном варианте движения буксируемой системы выделяется ряд стационарных и квазистационарных типовых режимов буксировки:
– движение с постоянной скоростью по прямой с постоянной длиной троса;
– движение с постоянной скоростью по прямой с изменяющейся длиной троса;
– движение по прямой с постоянной длиной троса с замедлением или ускорением;
– движение по прямой с переменной длиной троса с замедлением или ускорением;
– движение на циркуляции с постоянной скоростью при постоянной длине троса;
– движение на циркуляции с постоянной скоростью при переменной длине троса.
В начале и конце каждого режима буксировки трос заметно изменяет свою конфигурацию. Считая движение буксируемого троса происходящим в однородном поле жидкости, можно решить задачу об изменении формы троса на всей выбранной траектории движения буксируемой системы. После расчленения траектории буксируемого аппарата на ряд типовых траекторий, производится расчет траектории судна раздельно на каждом из квазистационарных режимов, и полученные траектории судна состыковываются друг с другом с учетом начальных и конечных переходных процессов. Динамическая задача при этом распадается, при практической буксировке, на серию статических и квазистатических задач – стереотипов, которые можно хранить в памяти компьютера, либо проводить расчеты в реальном времени по мере продвижения буксируемого аппарата по заданной траектории движения. Очевидно, что такое упрощенное описание динамического поведения буксируемого троса в жидкости может быть справедливо лишь для определенных диапазонов изменения параметров движения (эволюционного движения) и характеристик буксируемой системы. Высший, стратегический уровень управления обеспечивает выбор соответствующего маршрута буксировки, исходя из поставленной задачи и состояния окружающей среды. Компьютерная программа строит необходимую траекторию и рассчитывает процесс движения по ней, используя библиотеку стандартных траекторий. В основе компьютерных программ расчета траекторий судна для любого типового квазистационарного режима буксировки лежит математическая модель системы судно – кабель – аппарат. Наиболее сложным элементом модели является динамическое поведение троса в жидкости при маневрировании судна-буксировщика, при этом динамика кабель-троса описывается системой нелинейных дифференциальных уравнений второго порядка в частных производных. Для расчета управляющих параметров принимается дискретная трехмерная математическая модель динамики буксируемой системы, включающая в себя судно, пассивный буксируемый аппарат, кабель-трос, один или несколько заглубителей. Кабель-трос в модели заменяется шарнирно-сочлененным многозвенником с идеальными сферическими шарнирами.
Численное моделирование показало, что для типовых режимов буксировки форма и натяжение троса вполне определенны, вследствие чего в таких режимах имеется однозначное соответствие между параметрами движения аппарата и судна. Таким образом, рассматривая эволюционное движение буксируемой системы как последовательность статических и квазистатических состояний, можно с достаточной для практических задач степенью точности производить прокладку траектории судна по заданному движению буксируемого аппарата и осуществлять тем самым прямое управление движением судна. Следует отметить, что математическая модель исследуемого объекта является одной из основных компонент компьютерной модели. Математическую модель подводной робототехнической системы – ПРТС можно разделить:
– на динамическую модель (модель внешнего состояния);
– диагностическую модель (модель внутреннего состояния).
Общий подход к созданию моделей ПРТС различного класса на основе единых уравнений динамики, позволяет создавать автоматизированные системы проектирования подводных технических средств [4, 5].
Структура и состав модулей ПРТС
Подводные ПРТС можно разделить на простейшие, с одним исполнительным модулем (подводным аппаратом), и составные, с двумя и более модулями.
Простейшими ПРТС являются системы типа носитель – подводный аппарат, например:
судно → самовсплывающий модуль;
судно → автономный необитаемый подводный аппарат;
обитаемый подводный аппарат (ОПА) → автономный необитаемый подводный аппарат (АНПА);
судно → трос → опускаемый манипулятор;
судно → трос → буксируемый управляемый модуль;
судно → трос → подводный телеуправляемый аппарат (ПТА);
обитаемый подводный аппарат (ОПА) → трос → подводный телеуправляемый аппарат (ПТА);
автономный необитаемый подводный аппарат (АНПА) → трос → подводный телеуправляемый аппарат (ПТА);
Основным структурным элементом ПРТС является система «гибкая связь + твердое тело». Каждую ПРТС можно разложить на основные структурные элементы. В случае несовпадения количества твердых тел (I) и гибких связей (J) в неполной системе (I ≠ J) её можно, при необходимости, довести до полной (I = J) путем добавления тел с нулевыми массогабаритными характеристиками, если I < J; и гибкими связями с нулевой длиной, если I > J. Количество основных структурных элементов в системе может колебаться от одного (заякоренный буйреп или буксируемое тело) до нескольких десятков (составные буйковые станции). Общая классификация простейших подводных ПРТС приведена на рисунке.
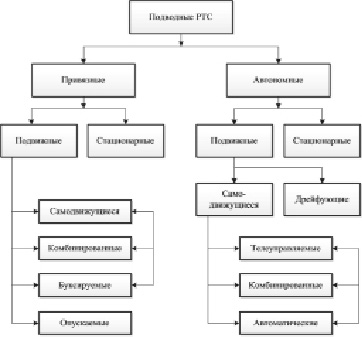
Общая классификация ПРТС
Связи в системе могут быть внутренними и внешними. Внутренние связи объединяют твердые тела в систему. Внешние связи накладывают ограничения на движение системы относительно некоторой системы координат в соответствии с накладываемыми граничными условиям. Соответственно, система, обладающая только внутренними связями, является свободной. Система, в которой имеются и внешние связи, будет несвободной или связанной. Примером свободной системы могут являться автономные подводные аппараты. Несвободными являются телеуправляемые по кабелю системы, донные ПРТС и др. Анализ применяемых в практике ПРТС позволил выделить несколько типов внешних связей, реализующих задаваемые граничные условия. Классификация, условные изображения и физическая реализация внешних связей приведены в таблице.
Внешние связи
|
№ |
Число степеней свободы |
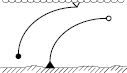
Условное изображение внешней связи |
Реализация внешней связи |
|
1 |
æ = 0 |
|
Неподвижное плавучее основание (судно с системой динамического позиционирования, плавсредство на якоре, стационарная платформа и т.п.). Груз или якорь, неподвижно лежащие на дне |
|
2 |
æ = 1 |
|
Надводное средство, перемещающееся по прямой, например канатная дорога, или судно, идущее прямым галсом. Донное транспортное средство, перемещающееся по прямой линии, например по рельсовому пути, или подводное устройство перемещающееся вдоль трубопровода |
|
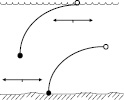
3 |
æ = 2 |
|
Надводное плавсредство. Транспортное средство, перемещающееся по дну |
|
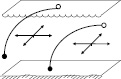
4 |
æ = 3 |
|
Подводный аппарат или подводная лодка. Тело нейтральной плавучести. Свободный конец гибкой связи |
В зависимости от характера граничных условий, несвободные ПРТС могут быть разделены на три большие группы: ПРТС, связанные с дном, ПРТС, связанные с поверхностью воды, и комбинированные (в том числе и с освобождающимися связями) системы. В свою очередь связанные с дном делятся на подгруппы заякоренных (с числом степеней свободы конца гибкой связи æ = 0) и перемещающихся по дну (æ = 1 и æ = 2) системы. Связанные с поверхностью воды ПРТС также делятся на опускаемые с плавучих оснований (æ = 0) и буксируемые (или дрейфующие) системы с æ = 1 и æ = 2. Комбинированные системы объединяют в себе признаки первых двух групп. Комбинированные системы, в свою очередь, делятся на стационарные (неподвижно соединенные с дном æ1 = 0 и поверхностью воды æ2 = 0) и подвижные (æ1 = 1 и æ1 = 2; æ2 = 1 и æ2 = 2). В каждую подгруппу могут входить плоские (располагающиеся в вертикальной плоскости) и пространственные системы. Разделение на плоские и пространственные системы достаточно условно, поскольку при воздействии пространственного поля течений на плоские системы последние могут принимать пространственную конфигурацию. ПРТС можно разделить на системы с независимыми и зависимыми граничными условиями, а также на системы с постоянными и переменными граничными условиями. Кроме того, между граничными условиями может существовать дополнительная связь.
Рассмотрим структурные особенности ПРТС. Робототехнические системы могут иметь разомкнутую, замкнутую и комбинированную структуры. Простейшей системой с разомкнутой структурой является линейная кинематическая цепь, более сложной – система со структурой дерева. В системах с замкнутой структурой имеются замкнутые (кольцевые) кинематические цепи. Причем замкнутые кинематические цепи могут быть внутренними и внешними. Внутренние замкнутые кинематические цепи состоят только из внутренних связей. В структурах с внешними замкнутыми кинематическими цепями кинематические цепи замыкаются с помощью внешних связей. Комбинированные структуры состоят из замкнутых и разомкнутых кинематических цепей. ПРТС могут являться системами с однородными связями (например, только с гибкими), тогда структуру такой системы можно назвать однородной, и с неоднородными связями (например, наряду со связями имеются шарнирные соединения или связи других конструктивных реализаций) – в неоднородных структурах. Следует использовать понятие систем с открытыми и закрытыми структурами. Открытые структуры обладают свободными от связей кинематическими цепями. В закрытых структурах все цепи являются замкнутыми. Кроме того, ПРТС можно подразделить на простые системы, имеющие в своей структуре один основной структурный элемент, и сложные. Как указывалось выше, ПРТС делятся на системы с постоянными и переменными структурами.
В механической системе могут иметь место два типа связей – конструктивные и формальные (аналитические). Конструктивными связями являются гибкие связи. Формальные связи могут быть заданы в аналитической форме и реализовываться путем приложения к системе управляющих сил. В этом случае система будет совершать управляемое движение в соответствии с содержанием формальных связей [6–8].
Заключение
Как указывалось ранее, основным структурным элементом ПРТС является система «гибкая связь + твердое тело». Осуществив голономизацию гибкой связи основного структурного элемента, можно получить голономную реономную систему твердых тел. Рассмотренный способ построения математических моделей подводных механических систем с голономными связями позволяет создавать компьютерные инструментальные среды для проектирования ПРТС, а также создает предпосылки для разработки средств и методов аналитического конструирования подводных неуправляемых и управляемых многосвязных объектов. Представленные в статье модели могут быть использованы для отработки интеллектных систем управления движением, а также для наполнения баз данных.
Работа выполнена в рамках государственного задания ИО РАН (тема № 0149-2019-0011) при поддержке РФФИ (проект № 17-05-41041 «РГО-а» и проект № 18-05-60070 «Арктика»).
Библиографическая ссылка
Лискин В.А., Зарецкий А.В., Римский-Корсаков Н.А. РАЗРАБОТКА ГЛУБОКОВОДНЫХ БУКСИРУЕМЫХ СИСТЕМ ДЛЯ ИССЛЕДОВАНИЯ ПРИДОННОЙ ОБЛАСТИ ОКЕАНА // Научное обозрение. Технические науки. 2019. № 1. С. 37-42;URL: https://science-engineering.ru/ru/article/view?id=1229 (дата обращения: 26.07.2026).
DOI: https://doi.org/10.17513/srts.1229