

 science-review.ru
science-review.ru
Современные средства робототехники могут использоваться для исследований и наблюдений в Мировом океане несколькими различными способами. Наиболее распространенными до сих пор являются традиционные экспедиции научно-исследовательских судов (НИС) с телеуправляемыми подводными аппаратами (ПТА) или автономными необитаемыми подводными аппаратами (АНПА) на борту. Последнее время к АНПА и ПТА часто добавляются поверхностные и подводные глайдеры и воздушные беспилотники (рис. 1), что позволяет выполнять комплексные исследования на достаточно больших площадях акваторий [1]. Однако использование НИС в качестве носителей средств океанской исследовательской робототехники обходится очень дорого, и поэтому длительность таких экспедиций обычно существенно ограничена.

Рис. 1. Средства робототехники для океанологических исследований на причале около научного судна Национального океанографического центра Великобритании
Другим всё шире внедряемым направлением выполнения океанологических исследований является применение поверхностных и подводных беспилотников (глайдеров) повышенной автономности с малым энергопотреблением или с использованием бортовых возобновляемых источников энергии (ВИЭ). Такие средства робототехники эффективны, экономичны и способны работать автономно несколько месяцев или даже лет [1, 2]. Но для всесторонней оценки океанологических процессов требуется использование одновременно огромного количества таких беспилотников, что существенно усложняет задачи исследований с организационной и финансовой стороны. Кроме того, их малые собственные размеры позволяют устанавливать на них только ограниченное количество датчиков и приборов, что часто делает их достаточно специализированными. Существенно большими функциональными возможностями обладают протяженные донные кабельные сети океанологических исследований, к которым присоединено множество приборов и средств робототехники, но их создание и эксплуатация требует огромных затрат. Наконец, наиболее перспективными являются активно разрабатываемые в настоящее время за рубежом автономные системы океанологических исследований с энергетическим обеспечением всех основных элементов за счет использования собственных зарядных станций на базе ВИЭ.
Океанологические исследования путем использования кратковременных единичных экспедиций НИС или подводных обитаемых аппаратов (ПОА) обычно не дают возможность получать непрерывные большие ряды данных. В свою очередь, это затрудняет проведение качественного анализа процессов, проходящих в океане, и создания их достоверных математических моделей. Перспективным направлением для решения задач долговременных широкомасштабных наблюдений в океане является создание и использование в прибрежных районах различных стран мира донных кабельных сетей большой протяженности. Примером такой кабельной сети может служить система «NEPTUN Canada» на шельфе Канады, доходящая до очень важных для ученых тектонических районов дна океана, с гидротермальными полями на глубинах более 2,7 км [3]. Сеть имеет общую длину оптоволоконных кабелей около 1000 км с встроенными в неё узловыми модулями (рис. 2), к которым присоединены различные исследовательские приборы и оборудование (блоки датчиков, сейсмографы, видеокамеры системы вертикального профилирования, ПТА и другое). Поступающие от них разно- образные данные по кабелям непрерывно передаются в Центр, а от него в систему передаются электроэнергия и команды управления.



Рис. 2. Участок сети «NEPTUN Canada» с научным оборудованием и ПТА «ROPOS» (сверху), донный узловой модуль на берегу (внизу слева) и донный ПТА «Wally» около полей газогидратов (внизу справа)
С помощью мощной информационной онлайновой системы «Oceans 2.0» любой специалист может через интернет получать данные и наблюдать подводную картину непосредственно в интересующей его точке около кабельной сети. В рамках программы роботизированных исследований экстремальных сред (ROBEX), объединяющей космические и глубоководные исследования в Германии, были созданы донные гусеничные ПТА «Wally» (рис. 2). Эти аппараты, разработанные в привязном кабельном и автономном вариантах, в течение многих лет поочередно подключались к сети обсерватории «NEPTUNE Canada» и обеспечили сбор цифровых и видеоданных на больших глубинах [4]. Особый интерес представляют автономные аппараты этой серии, типа «Viator» и «Tramper», оснащенные различными датчиками и микрозондами, видеокамерами с высоким разрешением, совершенными навигационными системами и манипуляторами. АНПА «Viator» способен отстыковываться от узлового модуля кабельной сети, работать автономно по заданной траектории, а затем возвращаться к узловому модулю для подзарядки бортовых аккумуляторов. Ещё более совершенным является АНПА «Tramper», автономность которого на дне между автоматическими подзарядками составляет около года. Большое значение при развертывании научного оборудования донной кабельной сети и получения информации о процессах в океане обеспечили также ПТА типа «ROPOS» (рис. 2), связанные с НИС или узловыми модулями гибкими оптоволоконными кабелями для энергоснабжения и передачи информации.
Комплексное совместное использование различных датчиков и измерительных приборов в определенном районе Мирового океана повышает эффективность сбора различного рода данных. Поэтому над кабельными сетями дополнительно регулярно работают НИС «Thomas G. Thompson» и другие суда, оснащенные разнообразными измерительными приборами, ПТА, АНПА и глайдерами для регистрации параметров на поверхности, в водной среде и на дне. Широкому распространению кабельных систем препятствуют огромные расходы, связанные с их развертыванием и эксплуатацией, и постоянная привязка к конкретному району исследования, без возможности перемещения её на новую акваторию.
Автономные сети океанологических исследований
В качестве альтернативы кабельным сетям нами в ИО РАН была разработана концепция долговременной автономной системы океанологических исследований, элементы которой получают питание от различных видов возобновляемой энергии океана (АСОИ ЭО) [5]. Конструктивно система АСОИ ЭО состоит из необходимого количества автономных стационарных узловых станций (СУП), вокруг базируются мобильные автономные измерительные платформы (АИП) и привязные измерительные платформы (ПИП), соединенные с СУП кабелями (рис. 3). В число АИП входят разнообразные плавучие зонды, АНПА и глайдеры, а к ПИП относятся блоки научных приборов, профилирующие зонды, обсерватории и ПТА.
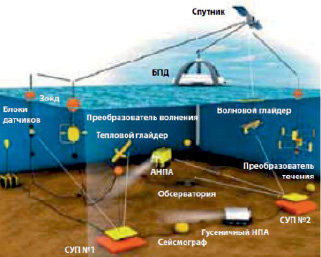
Рис. 3. Фрагмент системы АСОИ ЭО
Энергообеспечение такой системы обеспечивается блоками преобразователей различной мощности (от ватт до сотен киловатт), использующих энергию поверхностного волнения, солнечной радиации, подводных течений, теплового градиента океана и морского ветра. Для бесперебойного питания различных научных приборов, ПТА, АНПА и оборудования системы АСОИ ЭО необходимы разнообразные буферные накопители, аккумулирующие электроэнергию, поступающую от преобразователей. Одним из основных элементов системы АСОИ ЭО являются СУП, с одной стороны, представляющие собой узловые коммуникационные станции, обеспечивающие по гидроакустическим, кабельным и спутниковым каналам связь между всеми элементами системы, а с другой – узловые электростанции на базе морских ВИЭ, служащих для кабельного энергообеспечения, расположенных вокруг ПИП и для подводной подзарядки АИП путем стыковки с СУП или от неё через индукционные блоки. Обычно СУП состоит из автономного поверхностного стабилизированного буя и соединенного с донного модуля, аналогичного стационарному модулю системы «NEPTUN Canada» (рис. 2), Большим преимуществом по сравнению с кабельными системами является возможность, при необходимости, сравнительно легкого и дешевого переноса связок «буй – донный модуль» всех СУП, входящих в состав АСОИ ЭО в любой новый район Мирового океана. В свою очередь, все СУП региональной системы исследований должны располагаться на удалении в несколько миль вокруг мобильных базовых платформ управления и сбора данных (БПД), на которых будут расположены крупные дата-центры и где могут непрерывно работать вахтовым методом различные специалисты и ученые-океанологи. Такие БПД станут также местом постоянного базирования комплексов ПОА, ПТА, АНПА и воздушных дронов. В перспективе экологически чистые БПД, с полным обеспечением всех бортовых систем от возобновляемой океанской энергии, заменят существующие НИС для проведения экспедиционных исследований.
Зарядные станции для средств океанской робототехники в составе СУП АСОИ ЭО
Эффективность использования автономных поверхностных и подводных средств робототехники значительно повышается, если имеется возможность подзарядки их бортовых накопителей энергии непосредственно в районе проведения океанологических исследований. Использование НИС для этой цели обходится очень дорого, поэтому необходимы специальные автономные океанские зарядные станции, которые целесообразно интегрировать в состав оборудования стационарных узловых энергетических и коммутационных платформ (СУП) сетей АСОИ ЭО. Наиболее часто на исследовательских подводных беспилотниках в качестве бортового источника энергии используются либо литий-ионные аккумуляторы – АНПА «Remus» (США), «Explorer» (Канада), «Alistar» (Франция), «Talisman» (Великобритания), либо литий-полимерные – АНПА «Bluefin» (США), «Hugin100» (Норвегии), «Seaotter MK II» (Германия), «AUV-150» (Индия), «Autosub6000» (Великобритания) и «Isimi6000» (Южная Корея) [6]. По сравнению с другими накопителями такие аккумуляторы отличаются высоким напряжением, значительной емкостью, малыми массой и габаритами, большим количеством циклов заряда-разряда и долговечностью. Именно использование такого типа бортовых накопителей в сочетании с автономными узловыми станциями их подзарядки обеспечивает широкие возможности для океанологических океанских исследований робототехническими средствами. Обычно автономная станция подводной зарядки получает энергию от дизеля, газовой турбины или накопителя большой мощности, что ограничивает её собственную долговременность работы. Эту проблему позволяет полностью решить использование различных видов возобновляемой энергии океана [5], которая способна обеспечить непрерывную работу зарядной станции в течение нескольких лет.
Использование энергии поверхностного волнения для зарядных станций беспилотников
Одним из первых в этом направлении в 2002 г. был предложен шведский проект буя с гидравлическим преобразователем энергии поверхностного волнения для электроснабжения подводного гаража (док-станции) подзарядки АНПА [7]. Эта идея была развита в 2011 г. американской компанией «Ocean Power Technologies» (OPT), разработавшей энергетический буй-преобразователь энергии волнения PowerBuoy (APB350) для электроснабжения подводной зарядки АНПА [5, 6]. Конструкция зарядной станции на базе APB350 представлена на рис. 4.
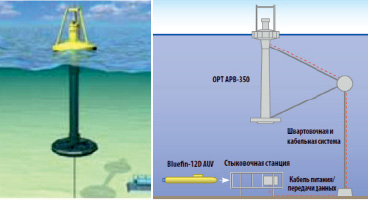
Рис. 4. Конструкция волнового энергетического буя APB350 «PowerBuoy» (слева) и гараж (док-станция) подводной зарядки АНПА от этого буя (справа)

Рис. 5. Стабилизированный буй – преобразователь энергии волнения APB-350 в акватории нефтяной платформы для электроснабжения средств морской робототехники и передачи информации
Стабилизированный буй «PowerBuoy» (APB350) действует как постоянно подзаряжаемый источник бесперебойного питания. Он предназначен для работы в океане в районах с широким диапазоном глубин от 20 м до 3000 м. Вертикальные колебания на волнении тороидального поплавка, размещенного на цилиндрическом корпусе стабилизированного буя, с помощью гидравлической системы обеспечивает работу привода высокоскоростного генератора со средней мощностью в 400 Вт, снабжающего электроэнергией накопитель большой емкости подводного гаража (док-станции) зарядки АНПА [8]. Кроме того, этот накопитель обеспечивает питанием бортовое оборудование буя и системы связи с берегом, а также расположенные на дне различные средства океанской техники. Общая длина буя составляет 13,3 м и масса 8,0 т, осадка буя 9,3 м, диаметры корпуса и поплавка буя соответственно 1,0 м и 2,65 м. Энергобуй APB350 обеспечивает среднюю дневную выработку электроэнергии 8,4 кВт-ч, пиковую мощность полезной нагрузки от 3,0 до 7,0 кВт и выходы электроэнергии постоянного тока напряжением 24 В и 300 В. Проект APB350 объединяет передовые запатентованные технологии в области гидродинамики, электроники, преобразования энергии и компьютерных систем управления, что позволило получить долговременный, автономный, надежный источник экологически чистой возобновляемой электроэнергии для различных океанских средств робототехники, датчиков и приборов анализа данных, телекоммуникаций и передачи данных на берег.
Использование волновых зарядных станций для АНПА в нефтегазовом секторе
Нефтяная компания «Eni» (Италия) подписала контракт с компанией «OРT» на многолетнюю установку с конца 2018 г. энергобуя APB350 у итальянского побережья для мониторинга морской среды и инспекции морских объектов с использованием морских беспилотников [9, 10]. При этом по проекту «Eni MaREnergy» технология APB350 используется в качестве автономной зарядной станции для системы связи и дистанционного управления, а также подводной зарядки аккумуляторов АНПА, что обеспечивает их долговременную работу на больших площадях акватории. За полгода выполнения этой программы, к лету 2019 г., волновым буем APB350 было уже выработано более 1,0 МВт-ч электроэнергии. Интересно отметить, что управление всем исследовательским комплексом в Адриатическом море постоянно осуществляется дистанционно из расположенного в США центра в Нью-Джерси [10]. Специалисты отмечают, что успешно развивающийся проект «ОРТ» с «Eni» демонстрирует возможности использования энергетических и коммуникационных платформ на базе APB350 «PowerBuoy» для широкого спектра операций по разведке и добыче нефти и газа в суровых морских условиях,, включая зарядку подводных беспилотных аппаратов для обеспечения их долговременной автономности, океанологические и метеорологические исследования, мониторинг и инспекцию скважин с помощью АНПА, а также вывод подводного оборудования из эксплуатации (рис. 5).
Аналогичное соглашение компания «ОРТ» подписала с компаниями «Premier Oil» и «Acteon», управляющими большим количеством морских нефтегазовых месторождений по всему миру, на установку в 2018 г. волновых буев APB350 для работы около нефтяных платформ в центральном и британском секторах Северного моря [11]. Основной целью этих проектов является изучение, при поддержке шотландского Центра нефтегазовых технологий, взаимных перспектив офшорной нефтегазовой отрасли и возобновляемых источников энергии на мировых рынках. Для этого планируется исследовать в натурных условиях системы подводной робототехники и АНПА для мониторинга и обеспечения безопасности подводного оборудования с электропитанием от волновых зарядных станций, в частности выполнять постоянные измерения давления и температуры в скважинах, а также использовать системы сбора данных и связи береговых центров с подводными модулями управления. Всё это потенциально может значительно сократить затраты нефтегазовых компаний на надежный и безопасный вывод подводного оборудования из эксплуатации в конце завершения срока работы скважин.
Китайская зарядная станция для АНПА с волновым МГД преобразователем
Другой перспективный проект автономной зарядной станции для океанской робототехники разработан рядом институтов Академии наук Китая [6]. Устройство (рис. 6) представляет собой поверхностный стабилизированный буй (1) с демпфером в подводной части (2) и поплавком (3), возвратно-поступательное движение которого на волнении приводит в движение жидкометаллический магнитно-гидродинамический (МГД) преобразователь энергии.
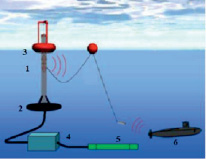
Рис. 6. Стационарная узловая платформа АСОИ ЭО с зарядной станцией на базе точечного МГД преобразователя энергии поверхностного волнения
Вырабатываемая буем электроэнергия поступает по кабелю на установленный на дне мощный литиево-ионный подводный накопитель энергии (4), соединенный кабелем с индукционным блоком (5) бесконтактной подзарядки батарей АНПА (6) и других средств подводной робототехники. Удлиненный цилиндрический корпус буя диаметром 1,0 м, оснащенный в нижней части демпферной пластиной диаметром 6,0 м, обеспечивает его хорошую устойчивость в широком диапазоне параметров волнения. Это позволяет тороидальному поплавку диаметром 4,0 м скользить вверх-вниз по корпусу буя, отслеживая профиль волнения, за счет чего приводится в движение жидкий металл (галинстан – сплав галлия, индия и олова), который, протекая в магнитном поле МГД генератора, обеспечивает производство электроэнергии. Важным преимуществом использования для зарядной станции МГД преобразователя энергии волнения от механико-гидравлического преобразователя APB350 (США) является его практически бесшумная работа, что часто бывает необходимо для проведения гидроакустических исследований в океане.
Прототип МГД преобразователя энергии волнения был разработан в Китае в 2011 г., дальнейшее его усовершенствование позволило получить к 2015 г. при испытаниях в натурных условиях возле острова Чжухае выходную мощность 2,2 кВт. На основе полученных результатов испытаний была разработана подводная зарядная станция для АНПА «Odyssey II», оснащенного бортовой литиево-полимерной батареей, емкостью 1,0 кВт-ч. Для её подзарядки требуется постоянный ток силой 10 А и напряжением 36 В. Максимальная глубина погружения беспилотника этого типа составляет 3000 м, скорость движения до 3,0 узлов, сухой вес 200 кг, длина 2,2 м и диаметр 0,58 м. Бесконтактная индукционная передача электроэнергии имеет ряд преимуществ перед контактным «мокрым» соединением АНПА с гаражом (док-станцией), к которым относятся: отсутствие коррозии разъемов и высоких требований по точности подводной стыковки-расстыковки.
Индукционный блок рассматриваемой зарядной станции способен обеспечить зарядку бортовых аккумуляторов АНПА «Odyssey II» с максимальной мощностью передачи электроэнергии до 1,27 кВт и эффективностью около 85 %. Доработанный проект зарядной станции с МГД генератором, мощностью 4,4 кВт при натурных испытаниях позволил производить одновременно подзарядку трех АНПА, а также обеспечивать электроэнергией приборы океанологического мониторинга окружающей водной среды и спутниковый канал передачи полученных данных. В законченном, рабочем варианте такая зарядная станция при поверхностном волнении высотой 2,4 м и периодом 5,2 с должна обеспечить генерацию около 105,6 кВт-ч и бесконтактную передачу электроэнергии емкостью 57,8 кВт-ч, чего достаточно для зарядки 51 беспилотника типа АНПА «Odyssey II» в течение только одного дня [6].
Использование энергии течений для зарядных станций беспилотников
В 2010 г. сотрудниками Вудс-Холского океанографического института (США) был создан подводный блок «Flip Wing» с турбиной малой мощности, специальный профиль лопаток рабочего колеса которой позволял эффективно использовать кинетическую энергию течений с малыми скоростями потока для обеспечения электроэнергией автономной зарядной станции АНПА [6]. В 2017 г. шотландская компания «EC-OG» завершила натурные испытания в Европейском центре морской энергии (EMEC) автономной зарядной станции «Subsea Power Hub» (рис. 7), представляющей собой гибридный подводный блок гидротурбины с вертикальной осью (3) и генератор (4) для преобразования энергии океанических течений в электрическую энергию, поступающей во встроенный бортовой литиево-ионный накопитель (2) большой емкости [12]. На энергетическом блоке установлены также аппаратура передачи-приема данных (1) и модуль (5) управления работой скважиной во время подводной добычи нефти и газа, получающей питание от зарядной станции.
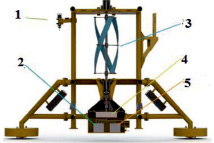

Рис. 7. Подводный преобразователь энергии течений «Subsea Power Hub» с встроенным накопителем зарядной станции для средств робототехники
Возможность использовать возобновляемую электроэнергию прямо в точке проведения буровых работ позволяет отказаться от многочисленных кабелей и гидравлических шлангов к поверхности или берегу, что значительно снижает капитальные затраты, а также повышает надежность и эффективность офшорных нефтегазовых работ. Подводные блоки «Subsea Power Hub» предназначены для автономного питания различной подводной инфраструктуры и средств робототехники, в том числе и для зарядных станций бортовых батарей АНПА, выполняющих долговременные океанологические исследования.
АСОИ ЭО как средство повышения эффективности океанологических исследований
Кроме обеспечения энергией стационарных узловых платформ АСОИ ЭО, включая автономные зарядные станции АНПА и других средств океанской робототехники для океанологических исследований и офшорной нефтегазовой индустрии, подобные энергетические блоки могут быть широко использованы в различных направлениях морской экономики, таких как обеспечение электроэнергией и холодом центров обработки данных морского базирования, электроснабжения морских рыбных ферм и опреснительных установок, в офшорной ветровой энергетике, а также для снабжения чистой электроэнергией населения островных государств и т.д. Так как чистая энергия вырабатывается непосредственно в точке потребления, это обеспечивает значительное снижение выбросов CO2 по сравнению с традиционными источниками энергии.
Внедрение системы АСОИ ЭО может также значительно повысить качество научных исследований за счет того, что использующиеся в ней основные элементы и робототехнические средства с энергоснабжением от возобновляемой энергии океана позволяют автоматически и практически без временных ограничений получать непрерывные большие массивы различных данных о биологических, геологических, физических и химических процессах в океане. Кроме того, отсутствие дефицита энергии позволяет обеспечить постоянный обмен данными и управляющей информацией в реальном масштабе времени между элементами АСОИ ЭО и дата-центрами, а также дистанционно изменять программы наблюдений и порядок взаимодействия технических средств непосредственно в исследуемой среде [5]. Получаемые от АСОИ ЭО высококачественные океанологические и метеорологические данные возможно использовать в сложных многофакторных математических моделях и получать гораздо более точные прогнозы погоды или вероятных природных и технологических катастроф, а значит – предотвратить гибель людей и значительный экономический ущерб.
Заключение
В последние годы многие из 33 океанских научно-исследовательских судов Российской академии наук, Росгидромета и Роснедр пришли в «катастрофическое и кризисное состояние» и они «могут полностью прекратить работу в ближайшие годы» [2]. Выполненные нами оценки показали, что стоимость строительства и эксплуатации океанских беспилотников за 35-летний «жизненный цикл» в десятки сотен раз меньше, чем у НИС [2]. Кроме того, актуальность использования экологически чистой морской робототехники значительно повышается с учетом новых требований к морским судам в области выбросов выхлопных газов дизелей с большим содержанием вредных оксидов азота и серы. Без дорогостоящей модернизации отечественных НИС под новые правила им просто могут запретить выход в море. Единственный эффективный выход из создавшейся в нашей стране ситуации заключается в ускоренном развитии океанских средств робототехники повышенной автономности и широком внедрение систем концепции АСОИ ЭО (Digital Ocean). Для этого необходимо разобраться, какие океанологические программы и по каким научным направлениям возможно выполнять морскими беспилотниками, а какие – пока только с использования НИС [1]. По мере расширения использования робототехники по новым многоцелевым комплексным научным программам суммарная экономия экспедиционных затрат всех ведомств нашей страны, проводящих океанологические исследования и наблюдения, может достигнуть значительного объема. Долговременность и высокая степень автоматизации элементов АСОИ ЭО позволяет в значительной степени отказаться от использования НИС для выполнения многих научных задач в морях и океанах, что также обеспечит значительный экономический эффект в масштабах всех заинтересованных отечественных организаций, за счет существенного снижения экспедиционных расходов, прежде всего на топливо для судов. Широкое внедрение отечественных средств робототехники позволит перейти к новой парадигме океанологических исследований, обеспечивающей автоматическое, непрерывное, не ограниченное по времени и экономически эффективное получение данных о различных процессах, происходящих на границе атмосферы и Мирового океана, а также в его водной толще и на дне.
Работа выполнена в рамках государственного задания ИО РАН (тема № 0149-2019-0011).
Библиографическая ссылка
Горлов А.А. ЗАРЯДНЫЕ СТАНЦИИ АВТОНОМНЫХ РОБОТОТЕХНИЧЕСКИХ СИСТЕМ ОКЕАНОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ // Научное обозрение. Технические науки. 2019. № 4. С. 27-35;URL: https://science-engineering.ru/ru/article/view?id=1253 (дата обращения: 30.06.2026).
DOI: https://doi.org/10.17513/srts.1253